基于PIC单片机的主动放线机设计
0引言
速度是工业生产中的主要被控参数之一,与之相关的各种速度控制系统已被广泛应用于冶金、化工、机械、食品等领域。本文介绍的主动放线机速度自动控制系统适用于微细金属线的恒张力主动放线,可广泛用于拉丝机、绕线机的前端放线,并可在放线过程中保持金属线的张力恒定。适用的线材有金、银、铜、铝等,放线速度为0~700 rpm,线径可达φ0.05 mm,张力控制可通过摆臂一边悬挂的砝码来手动调整。
整个系统选用六线式单极性步进电机为执行部件,具有低成本和控制方法简单的优点,核心控制芯片选用美国Microchip公司的PIC单片机 PIC18F66J10,该芯片具有实用可靠、代码保密性好、片内集成有模拟、数字功能部件等优点。而系统选用美国Allegro Microsystems公司的单极性步进电机专用驱动芯片SLA7026则集驱动和保护于一体。因此,该放线机系统结构简单、价格低廉、工作稳定可靠。
1 系统结构及工作原理
1.1 系统总体结构
该放线机速度控制系统主要由主控芯片PIC18F66J10、驱动芯片SLA7026步进电机驱动器、单极性步进电机、反馈指示装置、环形电位计和相应机械装置构成。其结构组成框图如图1所示。

1.2 系统工作原理
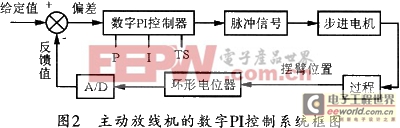
当绕线机的线速度大于放线机的线速度时,摆臂上的滑轮会向上移动,此时如将环形电位器反馈回的电压信号送到单片机PIC18F66J10的模拟输人口进行AD转化以得到数字量大于程序设定的数字值,然后经过PI算法运算后,就可使控制器输出的四路脉冲频率增加。频率增加后的脉冲信号经驱动器隔离放大后,最后送给步进电机,使电机速度增加,从而使摆臂回到水平位置。反之,当绕线机的线速度小于放线机的线速度时,摆臂上的滑轮会向下移动,这样,通过 PI调节,同样可以使摆臂最终回到水平位置。因此,通过摆臂位置反馈来自动控制放线速度,使放线机速度与绕线机速度保持同步,便可构成一个闭环数控系统。其数字PI控制系统框图如图2所示。图中,P为比例系数,它所构成的控制器比例环节的作用是对偏差瞬间做出快速反应。I是积分系数,它所构成的积分环节的作用是把偏差的积累作为输出。TS为采样时间,它决定单片机每隔多长时间将实时位置反馈量与程序设定目标量的差值带入PI算法公式。
2 硬件设计
2.1 步进电机控制器
本系统中的步进电机控制器主要由单片机PIC18F66J10、反馈信号调理电路、光电隔离电路等组成。
(1) 单片机PIC18F66J10
单片机PIC18F66J10是Microchip公司推出的一款8位高档Flash型单片机。具有如下特点:
◇采用纳瓦技术,具有多种运行模式,可显著降低功耗;
◇片内具有64 KB的Flash程序存储器和2048字节的SRAM数据存储器;
◇内部锁相环(PLL)倍频器在外部振荡器模式下使用时,其允许时钟速度高达40 MHz,从而可使执行速度达到10 MIPS;
◇包含2个独立增强型USART异步串口以及2个主控SSP同步串行端口模块,同时具备SPI和I2C (主控和从动)两种工作模式;
◇具有2个捕捉/比较/PWM (CCP)模块和3个增强型CCP模块,具有控制的最大灵活性;
◇有11个通道10位A/D转换器。该模块包含有可编程采集时间,因此不必等待一个采样周期就可选择通道并启动转换,从而减少代码开销。
实际上,设计时可选用11 MHz晶振,并通过使用片内4倍频锁相环使系统时钟频率达到40MHz。也可用单片机驱动能力较强的PORTC口的RC0、RC1、RC2、RC3这四个管脚来输出具有时序的方波,以作为控制步进电机转速的控制信号。由于单片机内部集成有11通道10位高速A/D转换器,因此,选用模拟通道AN0作为 A/D转换的模拟电压输入。A/D转换的参考电压使用芯片自带的正电源电压和负电源电压(AVDD和AVSS)。
(2) 反馈信号调理电路
由于从环形电位器反馈回的电压信号范围是0~10 V,此电压超过了A/D转换器的输入要求,所以要经过精密电阻分压、电容滤波、集成运放构成的电压跟随器跟随,再送到单片机的模拟通道输入口。本设计选用 1MΩ和330 kΩ的电阻来进行分压,以使进行A/D转换的电压信号变化范围保持在0~2.5 V。其中集成运放选用低功耗、单电源5 V供电的轨至轨输入输出通用运算放大器MAX492。
(3) 光电隔离电路
选用高速光电耦合器6N137组成的光电隔离电路将步进电机控制器与驱动器隔离开来,可消除电机电感性绕组的串扰,从而使驱动电路的变化不至于影响或者损坏控制电路部分,这样可提高系统的可靠性,增强其抗干扰能力。
2.2 步进电机驱动器SLA7026
步进电机按照电机驱动架构可分为单极性和双极性步进电机。本设计选用的单极性步进电机包含两组带有中间抽头的线圈,整个电机共有六条线与外界连接。
图3所示
- 基于PIC单片机的智能型漏电断路器设计(11-25)
- 基于PIC单片机的无线实时监控防盗系统的设计与实现(11-18)
- PIC单片机键盘矩阵扫描C语言程序(12-02)
- PIC单片机控制第一个发光管闪动程序(12-02)
- PIC单片机驱动LCD12864液晶显示闪动字体程序(12-02)
- PIC单片机控制8位流水灯C语言程序(12-02)