基于AVR单片机电风扇360度内摇头角度自由调节装置的实现
化设计框图如图4所示。
2.2 PI控制算法模块设计
在主程序中得到速度的偏差信号和电机转动的位置偏差信号,输入到控制算法模块。系统在每一次采得速度信号的同时也获得风扇转动的位置信息,系统根据输入的位置信号与系统的运行状态判断是否反向运行。对于电机转动的速度偏差,系统通过软件对转速进行防饱和的PI调节方法,算得PWM脉宽。PI控制算法模块框图如5所示。
其中Kp 为比例系数,Ki 为积分系数, Ui 为给定值; Uk 是第k 次采样的测量值; Qk 相当于校正量中的积分部分,初始值可取Qk= 0。在数字PI 控制系统中,当系统启、停或大幅度变动给定值时,系统输出会出现较大的偏差,经过积分项累积后,可能会出现积分饱和,从而增加了系统的调整时间和超调量, 影响控制效果。所以,在PI 算法中加入了防止积分饱和措施,即在速度偏差较大时(即E(k)>Emax)采用比例调节方式,这样调节速度很快,且防止积分饱和,当速度偏差较小时(即E(k)Emax)时比例作用较弱,采用比例积分调节方法。
3 调节装置功能实现
1、打开开始按钮,若起始角度,终止角度都处于非零(A终止>A起始)则电扇开始摇头。(注:A终止和A起始都为零,A终止A起始,不摇头)
2、可以设置定时摇头时间,改变在面板上按向上向下键改变摇头速度。
3、若摇头过程中,需改变摇头角度,需重新输入起始终止角后按确认键后摇头角度更新。
4 结束语
针对市场上的落地电风扇的摇头角度都在90度左右,不能进行调节摇头速度,和摇头角度,本文创新点是采用了AVR新型单片机169为微控制器,加上了AS5040旋转编码器及3966驱动,构成对直流电机控制,实现了电风扇360度内摇头角度自由调节的功能。

图4 系统程序总的控制流程图
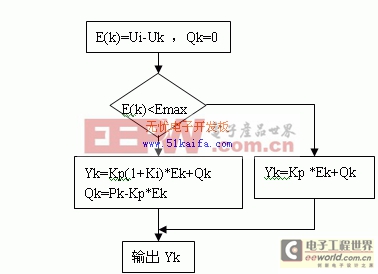
图5 PI控制算法模块框图
参考文献
[1] 朱欣华,姚天忠,邹丽新,智能仪器原理与设计[M],北京:中国计量出版社,2002
[2] 金春林,邱慧芳,张皆喜,AVR 系列单片机C语言编程与应用实例[M],北京:清华大学出版社,2003
[3] 耿德根,宋建国,AVR 高速嵌入式单片机原理与应用(修订版)[M] 北京:北京航空航天大学出版社 2002.10
[4]宋绍民,何继江,廖代文,AVR单片机在腐蚀性介质温度动态测量中的应用[J],微计算机信息, 2004年第12期
AVR 旋转编码器 AS5040 直流电机 PWM 相关文章:
- Flash损耗均衡的嵌入式文件系统设计(06-01)
- 锁相环控制及初始化简析(08-27)
- 基于AVR单片机的ISP1362OTG设计(09-06)
- 基于AVR单片机的串口转FSK的通信模块设计(01-23)
- 案例分析:基于AVR32的隧道环境监测系统(03-18)
- 科技帮我们远离灾难:灾难检测飞行器(03-18)