科技帮我们远离灾难:灾难检测飞行器
时间:03-18
来源:3721RD
点击:
一、项目概述
1.1 引言
电子E队,没有做不到,只有想不到。
1.2 项目背景/选题动机
2011年三月份,在各大媒体上都看见了日本地震后,核辐射搞得身边的人都很恐慌,于是我们就产生了制作一个可以深入灾难危险地带的飞行器的想法。无人驾驶的遥控飞行器可以毫无忌惮的深入危险之地,测量一些实时的数据传送回来,以便在远处安全地带的我们了解危险地带的一些情况。此次灾难检测飞行器所需达到的功能是:在一定遥控范围内,飞行器平稳飞离遥控地点,并将危险气体的参数传回遥控地点。
二、需求分析
2.1 功能要求:飞行一定距离后采样数据并返回,在遥控器上显示。
2.2 性能要求:飞行高度可达60m,飞行距离可达1Km,采样速率5s/次,精确度小于5%
三、方案设计
3.1 系统功能实现原理
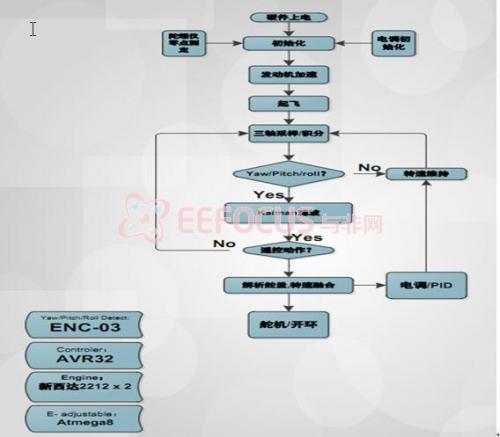
3.2 硬件平台选用及资源配置
主控芯片:AVR32
电机: 新西达2212*2
E-adjustable:Atmega8
Yaw/Pitch/Roll Detect :ENC-03
3.3系统软件架构
系统软件主要是飞行控制代码,还有传感器的驱动代码,显示液晶的驱动....
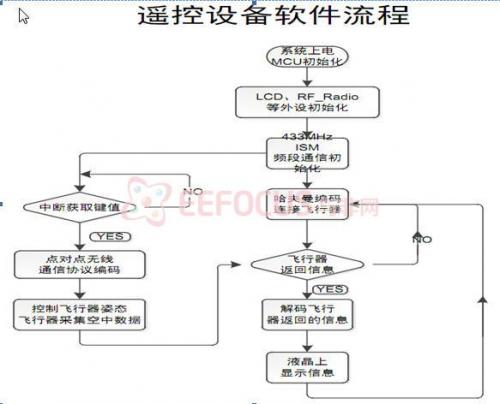
3.4 系统软件流程
3.4 系统预计实现结果
系统能够平稳的飞行,高度可达60m,遥控飞行距离可达 1Km(无障碍物条件下)
至少返回飞行器所在的两种危害气体参数值(如CO,SO2,...),误差在5%以下。
推荐阅读: 30例经典检测、监测、监控系统完整解决方案,从实际应用需求出发
- 案例分析:基于AVR32的隧道环境监测系统(03-18)
- DIY你的电子玩具:网络音乐电台,给你系统解决方案、软硬件设计实现(04-16)
- DIY智能家庭营养专家系统解决方案,我的健康我做主(04-19)
- 完整的家庭安全卫士系统方案,提供硬件框图、软件流程(06-03)
- 智能传感器节点能有多强大,这个方案告诉你(06-03)
- 轻松DIY一个家庭智能门窗控制系统吧(11-25)