用单片机制作的遥控回应式报警装置
本文介绍的遥控回应式报警装置,可在150米范围之内监控报警对象,适合于各种场合的防盗报警。对于一些无回应方式的报警系统,也可作为其功能缺项的补充。该装置采用编、解码器和PIC单片机处理收发的监控和报警信息,使监控准确、抗干扰性强,并减少了元器件的数量和整机功耗。
1 系统功能和特点
该遥控回应式报警装置的功能和特点如下:
·通过遥控器按钮可测试与主机的通路状态,对主机设置即时回应、定时回应和遇警鸣笛等工作方式。
·通过遥控器按钮观察三个通道报警状态的实时连续变化,可准确判断报警对象所处的环境状况。
·功能扩展灵活。可通过软件编程和增加报警通路而方便地扩展为智能防盗系统。
2 硬件电路及原理
本装置由遥控器和主机两部分电路组成。
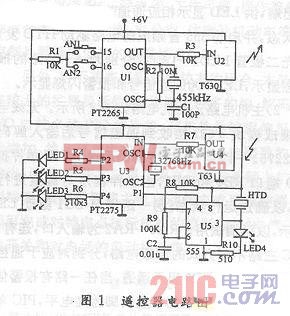
1)遥控器电路。遥控器电路如图1所示。PT2265为编码芯片,内含振荡器、键输入扫描采样编程器和波形输出等电路。OSC1和OSC2两端接上 455kHz晶体构成振荡电路。按键值由AN1和AN2输入,PT2265只允许一个键值输入,若该键不松开,则其它键操作无效。其OUT脚的输出经编码载波信号送给T630发射出去。T630为无线电专用发射模块,集成了脉冲调制、振荡和发射功能,工作于150kHz长波频段,抗干扰性较强。
主机发来的回应和报警信号,由与T630配对的无线电专用接收模块T631接收。T631集成了无线接收、解调等电路,其输出信号送至PT2275的输入端IN。PT2275是与PT2265配对的解码电路,用一个32768Hz的晶振连于OSC1和OSC2之间,构成振荡电路。将T631送来的主机信号解码后送到输出端,供LED显示相应通道的回应信号和报警实时状态,并启动 555音频振荡电路驱动HTD发声。发光二极管LED1~LED3分别为A~C路的报警状态显示,LED4为回应信号和报警闪烁显示。
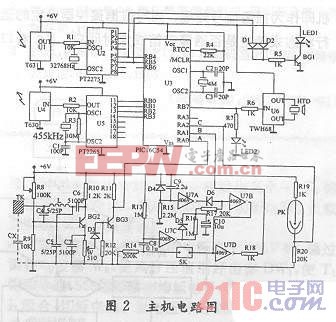
2)主机电路。主机电路如图2所示。无线电接收集成模块T631接收到遥控信号后输入解码器PT2275。一路经PT2275解码后送至PIC单片机的I/O端口RB4和RB5,由软件程序对键值进行处理,以确定运行状态;另一路送至BG1驱动LED1显示,以供调试用。RA0~RA2为输入口,连有 A、B、C三路不同方式的传感电路,分别对应于遥控器上的LED1~LED3显示通道。当任一路有报警信号时,均使RA输入口的相应引脚为高电平,PIC 单片机即作为报警信号处理。同时根据遥控器设定的运行状态来确定是否遇警鸣笛或定时回应。RA端口的实时状态信号由输出RB0~RB2送至PT2265编码器编码,然后送给T630发射出去。
报警传感电路中,A路为感应式报警电路,感应板TK与地之间存在着分布电容CX,与BG2、L、C4、 C5共同组成电容式三点振荡器。正常工作时振荡电压经D3送至BG3使其导通,使A点电平为低。当有人体接近感应板时,分布电容CX增大,直至使BG2停振,使D3无输出,BG3截止,并输出高电平信号至A点。
B路为振动报警传感电路,由CD4069的4个反相器组成。正常时,U7A和U7B 输出为高电平,U7C和U7D输出低电平。当遇振动时,振动传感器导通,使C8向U7C输入一个负脉冲,则U7C输入端为高电平,使输出为低,经U7D反相后输出高电平报警信号至B点。当SK不受振动时关闭,C10放电,U7D输出低电平,恢复报警守候状态。C路为水银开关传感电路。当报警对象倾倒或有较大位移时,会使水银开关导通,产生一高电平报警信号至C点。 RB7为音频输出口,当有报警信号且设置在遇警鸣笛状态时,RB7由原低电平变为间歇高电平输出,TWH68升压块驱动高响度喇叭鸣笛。
3 软件设计
主机部分的PIC单片机软件设计流程图如图3所示。程序开始后需对I/O口的输入输出方向、RTCC的计数值等初始化。延时15s是为了使主人离开后启动系统。程序先对解码输入键状态进行扫描,RB4、RB5口的键值输入设定标志寄存器。在报警流程中,根据标志寄存器状态确定是否遇警鸣笛。并且,程序中设定两路报警同时发生时方鸣笛,以防干扰误鸣而产生噪音。在定时10s回应流程中,每1s巡回检测RA端口5次,10s发1次回应显示信号。本程序充分利用PIC单片机内置定时器RTCC的功能。通过设定计数值来达到65ms的硬件延时,这样,在满足RB端口输出显示所需延时的前提下,可保证程序0. 2s监视1次RA口,而不必等到10s软件定时结束后才发生,这也是PIC单片机内置集成功能部件的优点所在。
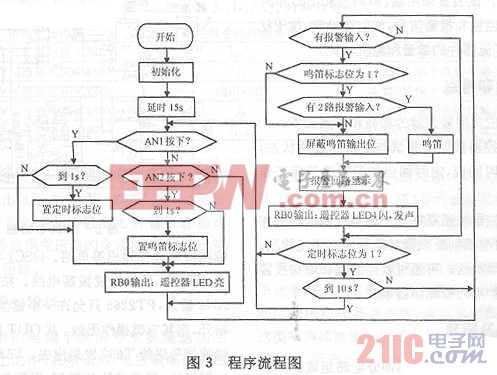
程序设计中,遥控器—主机双方正常响应的通信状态:主机初始为定时回应和遇警鸣笛工作方式,即在主机启动 15s后每10s发1次回应信号,且遇警时主机鸣笛。定时回应状态便于随时测定距离。遥控器每按动1次按健AN1或AN2,则主机收到后即发回应信号,使遥控器LED4亮。若每按动1次AN1达1s
- 基于TMS320F240的红外线设备远程报警系统设计与实现(04-17)
- 监测识别报警型是DSP摄像机的发展方向(08-15)
- 基于ADSP-BF533的家庭安全系统设计(03-26)
- 基于嵌入式Linux的倒车影音系统设计(09-08)
- 基于CC430F5137的无线温度采集报警系统设计(07-10)
- 基于MMS的即时报警系统设计(01-23)