基于DSP电动汽车无刷直流电机相位测试
4.2 霍尔信号中断模块
霍尔传感器位置信号随着电机转子的转动而发生改变,控制器的捕获单元在霍尔信号输入引脚上捕获到跳变沿信号,相应的中断标志CAPXX1-NT被置位,该中断向量的偏移地址被写入到对应的事件中断向量寄存器中,同时中断标志寄存器IMR中的INT4位由硬件置1,对应于DSP控制器的内核中断INT4,进入到DSP内核中断INT4的服务子程序。进入INT4服务子程序后,先将DSP控制器状态寄存器ST0、ST1和累加器ACC压入堆栈,保护现场,再将相应事件中断向量寄存器的中断向量偏移地址送入到累加器,然后经分支跳转指令转入到捕获中断服务子程序的入口上,进入捕获中断服务子程序后,记下每两次CAP中断的时间间隔△T。
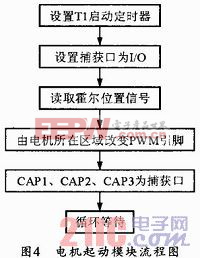
通过设置CAP1、CAP2、CAP3为IO功能查询捕获单元位置信号的输入引脚获得转子位置信号,根据此信号值查表计算换相程序偏移向量,调用相应的换相PWM子程序,从而通过改变PWM方式控制器ACTRA的值来控制PWM输出信号的改变,实现电动机的换相,然后恢复CAP1、CAP2、CAP3的捕捉功能,并将计数器清零,最后CPU将状态寄存器ST0,ST1及累加器ACC弹出堆栈,并推出INT4内核中断,结束捕获中断服务子程序(图5)。

4.3 逻辑换相模块
根据三相霍尔信号,以及无刷直流电机速度控制模块输出的PWM信号,逻辑换相模块输出6个电机换相及速度控制脉冲。有三相霍尔位置信号(H0、H1、H2)和由控制器模块输出的PWM信号这四个信号。定义Q1、Q2、Q3、Q4、Q5、Q6为六个输出信号,控制三相逆变器功率管的通断,Q1、Q3、Q5用于控制上侧功率管的通断,Q2、Q4、Q6用于控制下侧功率管的通断,逻辑关系为:
通过读取霍尔位置中断捕捉模块中的霍尔信号获取电机转子位置信号,确定逆变器功率管的开关状态。霍尔传感器的输出信号经过控制电路的逻辑处理,才能实现无刷直流电动机电枢绕组正确换相。对该系统软件正确编制决定了无刷直流电动机绕组电流的正确换相。电机绕组电流的换相时刻是由转子磁极位置确定的,位置传感器编码结果与功率变换器的开关管导通顺序一一对应。
5 结束语
文中介绍了电动汽车的一种新型驱动无刷直流电动机,重点介绍霍尔传感器作为位置传感器在无刷直流电机中的应用原理和相位测试方法,输入的转子霍尔位置信号和反馈电流信号对电机进行换相,实现PWM脉宽调制,达到对电机进行速度控制的目的。无刷直流电动机在启动时需要位置信号;位置信号还可以用于产生速度控制量;为了保证得到恒定的最大转矩,就必须不断地对三相无刷直流电动机进行换相,因此对于相位的测试具有重要的意义。
- 以DDS为参考的PLL在电台设计中的应用 (06-05)
- 基于MSP430的光伏并网发电模拟装置设计(04-07)
- 基于FPGA的流水线结构DDS多功能信号发生器的设计与实现(06-05)
- 基于CORDIC算法的光相位检测及FPGA实现(06-05)
- 基于FPGA的同频信号相位差测量算法的实现(02-27)
- 无菌冷灌装生产线上的自动化技术(12-20)