基于PIC单片机的小型空气压缩机控制装置
对线圈中电流流动方向的切换,如图2—5所示。在线圈驱动信号(FORWARD/REVERSE)的控制下,来切换线圈中电流的方向。驱动信号FORWARD为线圈正向加压信号,当置高电平时,产生正向电流和磁力,驱动活塞向一侧移动;而驱动信号REVERSE为线圈反向加压信号,当置高电平时,产生负向电流和磁力,驱动活塞向另一侧移动。两驱动信号为低电平时,磁力消失,活塞在复位弹簧力的作用下从两端返回中位。这样活塞在两驱动信号的控制下,以一定的频率做周期性直线往复运动。
3 动作顺序和程序框图
3.1 动作顺序
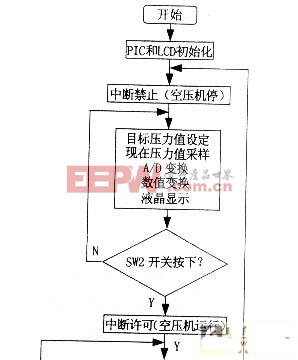
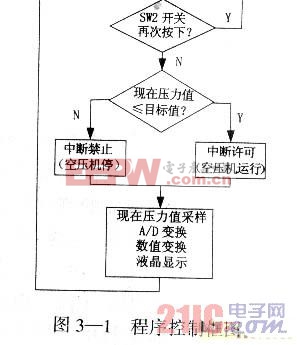
首先把SW1滑动开关置于ON位,电源接通。调节可变电阻完成对目标压力值的设置。按一下SW2按钮开关,空气压缩机就进入工作状态。空气压缩机运行中输出的压力值由压力传感器检测,并由液晶显示器显示出来。压力值一旦达到目标压力值,就自动停止运行。另外,在工作途中,如果按了SW2按钮开关,空气压缩机也会停止运行。在空气压缩机停止运转状态下,可再次设置目标压力值。工作完毕,应把SW1滑动开关置于OFF位,切断电源。这样空气压缩机在控制装置的控制下,能够自动地追踪设定的目标压力值。
3.2 程序框图
控制装置的整个程序包括PIC和LCD的初始化、A/D采样、数据转换、数据显示、按键响应判断、线圈驱动等子程序,其程序框图如图3—1所示。在这里,利用 PIC16F873的CCP(捕捉/比较/PWM)功能中的比较功能产生中断,来制作出驱动线圈的脉冲信号。在比较工作方式时,16位比较寄存器的值一直与定时器TMR1寄存器的值相比较,一旦相等,就产生中断。该机可精确地产生出时间间隔,而没有时间滞后现象。所以从程序框图中可以看出是用开、关中断来控制空压机运行和停止的。中断许可时产生驱动线圈的脉冲信号,空压机就运行;中断禁止时不产生驱动线圈的脉冲信号,空压机就停止运行。
4 结 论
笔者以PIC16F873单片机为核心开发出了价廉、小巧和便于携带的小型空气压缩机的控制装置,实验证明控制性能良好。实现了所研制的小型空气压缩机整体结构的小型、轻量化,使其可内藏于机器人的腕部,实现对手指关节的直接驱动成为可能。
[参考文献]
[1] 李学海.单片机硬、软件及应用讲座[J].电子世界,2001(1)~2001(6).
控制 装置 空气压缩机 小型 PIC 单片机 基于 相关文章:
- μC/OS-II下通用驱动框架的设计与实现(07-23)
- DSP和PBL3717A构成的步进电机的控制系统(04-01)
- 基于DSP的新型弹载控制计算机(04-05)
- 基于DSP的谐波控制器的研制(04-09)
- 数字信号控制器在变频家电中的应用(05-15)
- 基于DSP的磁流变阻尼器的控制方法(04-14)