直流电机双向调速驱动电路
对于PWM调速的直流电机驱动电路,主要考虑以下性能指标:
1、输出电流和电压范围。它决定着电路能驱动多大功率的电机;
2、效率。高的效率不仅意味着节省电源,也会减少驱动电路的发热。要提高电路的效率,可以从保证功率器件的开关工作状态和防止共态导通(H桥电路可能出现的一个问题,即两个功率器件同时导通使电源短路)入手;
3、对控制输入端的影响。功率电路对其输入端应有良好的信号隔离,防止有高电压大电流进入主控电路,这可以用高的输入阻抗或者光电耦合器实现隔离;
4、对电源的影响。共态导通可以引起电源电压的瞬间下降造成高频电源污染,大电流可能导致地线电位浮动;
5、可靠性。电机驱动电路应该尽可能做到:无论加上何种控制信号,何种无源负载,电路都是安全的。
笔者经过长期实验,得到一种可调速的双向直流电机驱动电路,电路如附图所示。
输入与电平转换部分输入信号线由Port引入,Port1脚是电机方向信号输入端,Port2脚是PWM信号输入端,Port3脚是地线。注意Port3脚对地连接了一个2kΩ的电阻。当驱动板与单片机分别供电时,这个电阻可以提供信号电流回流的通路。当驱动板与单片机共用一组电源时,这个电阻可以防止大电流沿着连线流入单片机主板的地线造成干扰。或者说,相当于把驱动板的地线与单片机的地线隔开,实现“一点接地”。电容C1防止电机突然启动造成电压的突降。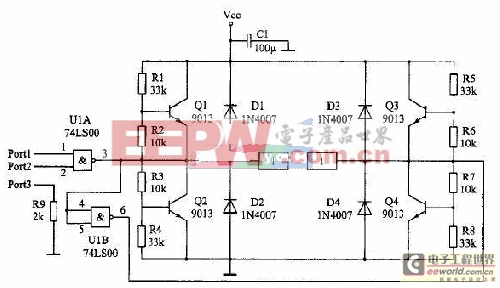
与非门U1A实现PWM信号与电机方向信号的调制,转换成接近功率电源电压幅度的方波信号。
三极管驱动部分三极管和电阻、二极管组成的电路驱动,实现对直流电机可调速正反转驱动。四个二极管起保护三极管的作用,防止感性元件(电机)产生的负感应电动势对三极管的冲击。
当74LS00输出端为低电平时,Q2、Q4截止,Q1、Q3导通,输出为高电平。当74LS00输出端为高电平时,Q2、Q4导通,Q1、Q3截止,输出为低电平。
性能指标电源电压15—30v,最大持续输出电流500mA/每个电机,短时间(10秒)可以达到700mA,PWM频率最高可以用到30kHz(一般用1—10kHz)。
布线大电流线路要尽量的短粗,并且尽量避免经过过孔,一定要经过过孔的话要把过孔做大一些(>1mm),并且在焊盘上做一圈小的过孔,在焊接时用焊锡填满,否则可能会烧断。另外,如果使用了稳压管,三极管射极、集电极对电源和地的导线要尽可能的短粗,否则在大电流时,这段导线上的压降可能会经过二极管和导通的三极管将其烧毁。
PWM调速的实现产生PWM信号可以由定时器来完成,但是由于51内部只提供了两个定时器,因此,如果要向三个或更多的直流电机输出不同占空比的信号,要反复设置定时器,实现较为复杂,我们采用一种比较简单的方法不仅可以实现对更多的直流电机提供不同的占空比输入信号,而且只占用一个定时器资源。这种方法可以简单表述如下:
在内存的某段空间内存放各个直流电机所需的输入信号占空比信息,如果占空比为1则保存0FFH(11111111B);占空比为0.5则保存0F0H(11110000B)或任何二进制数中包括4个0和4个1。即占空比=1的个数/8。
具体选取什么样的二进制数要看输出频率的要求。若要对此直流电机输出PWM信号。只要每个时间片移位一次取出其中固定的一位(可以用位寻址或进位标志C实现)送到电机端口上即可。另外,移位算法是一种对以前结果依赖的算法,所以最好定期检查或重置被移位的数,防止移错导致一直错下去。
这种算法的优点是独立进程,可以实现对多个电机的控制,缺点是占用资源较大,PWM频率较低。
- 基于DSP的无刷直流电机调速系统(06-01)
- 基于DSP的无刷直流电机伺服系统设计(03-14)
- 基于DSP储能飞轮用无刷直流电机的数字控制系统(06-08)
- 基于TMS320F2812无刷直流电机控制系统设计 (06-27)
- DSP在三相无刷直流电机控制系统的应用(01-10)
- 基于dsPIC30F3010实现无刷直流电机的无传感器控制(05-20)