基于DSP的永磁同步电机伺服控制系统设计
时间:03-02
来源:互联网
点击:
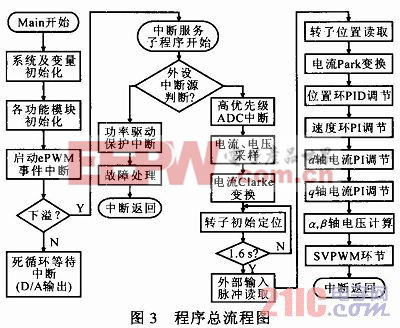
采用C语言编写伺服控制软件,系统控制周期为40μs,ePWM事件下溢触发A/D转换,然后进入周期中断,对采样信号进行处理得出新的PWM控制信号。编码器线数为1000。
4.1 电流环实验
电流环是内环,其动态响应特性直接关系到矢量控制策略的实现。实验中,给定电机定子q轴电流分量iqref为±8 A方波信号,给定d轴电流分量idref为零,使电机在电流环模式下运行,d,q轴电流响应如图4所示。其中电流控制器比例系数Kp=0.72,积分系数Ki=0.06。
由图可知,实际q轴电流快速跟踪其给定值,电流阶跃8 A响应时间约为0.5 ms,且基本无超调;实际d轴电流控制在其给定值零附近,电流脉动仅有±0.4 A。实验结果达到电流环的设计目的。

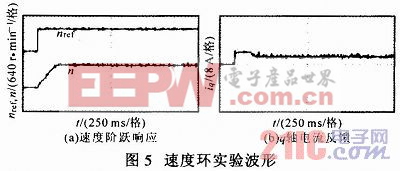
4.2 速度环实验
速度给定决定于外部脉冲频率,其中Kp=2.14x10-2,Ki=1.62x10-6。其速度阶跃响应波形如图5所示。可知,速度阶跃响应时间约为250 ms,速度动态响应较快,稳态时速度跟踪稳定。
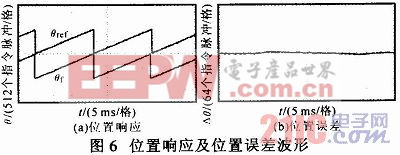
4.3 位置环实验
位置给定采用外部脉冲给定。在连续输入指令脉冲电机连续运行时,位置响应及其误差波形如图6所示。θref表示位置脉冲给定Pg,θf表示位置反馈Pf。图6b为位置误差波形。可见,电机连续运行,位置跟踪稳态误差均值为零;动态脉动±12个指令脉冲,对应机械角误差为±1.08°,实验结果表明位置环工作稳定。
以TMS320F2808 DSP为核心,结合永磁伺服控制特点,设计了一套永磁同步电动机伺服控制系统,实验结果表明:①单片TMS320F2808型DSP资源即可最大限度地满足永磁同步电动机伺服控制需要,系统成本低廉;②电流环响应迅速、速度和位置闭环控制无稳态误差,所设计系统工作速度快,且工作可靠。
伺服 控制系统 设计 电机 同步 DSP 永磁 基于 相关文章:
- 基于TMS320F28334的伺服系统模块设计(02-25)
- 基于DSP+CPLD的伺服控制卡的设计(04-10)
- 基于DSP的机器人视觉伺服系统研究(04-17)
- 基于DSP的无刷直流电机伺服系统设计(03-14)
- 基于DSP NNC-PID的电液位置伺服控制系统设计(07-24)
- 基于DSP的CANopen通讯协议的实现(01-18)