PIC16C65单片机在扫描隧道显微镜中的应用
1概述
扫描探针显微镜(STM)是纳米科技发展中最重要的工具。他基于量子力学中的隧道贯穿理论,其核心是一个能在金属样品表面上扫描并与样品间有一定的偏置电压的直径为原子尺度的针尖。当样品与针尖之间的距离非常接近时,电子就可以通过隧道效应由针尖转移到样品或从样品转移到针尖,从而形成隧道电流。隧道电流的大小与他们的间距成负指数关系[1]:
I∝B exp(-KS)(1)
其中:I为样品与针尖之间的隧道电流; B为与样品和针尖之间的偏压有关的系数; K为与自由电子的质量及有效平均势垒高度等有关的系数; S为样品与针尖之间的隧道电流。
扫描隧道显微镜的基本构成可以分为3个部分:头部系统、电子学系统、计算机系统。头部系统中的扫描器是一个很关键的部件,扫描器的质量决定了针尖和样品间距的控制精度,从而决定了STM图像的质量。目前一般采用管状的PZT压电陶瓷材料。扫描器可以在x,y,z三个方向上做纳米级的精密移动。xy扫描电压发生器产生例如三角波的扫描波形,控制扫描器对样品进行逐行扫描。针尖固定在扫描器上随扫描器运动。在针尖与样品偏置电压的作用下,当针尖和样品足够接近时,就会有隧道电流产生。灵敏的电流放大器检出隧道电流,并把他转化为电压,再与电流设置点做比较,比较的结果反映了针尖与样品间距与设定值之间的偏差。通常在STM电子学系统中引入比例积分控制器用做反馈电路,以调整扫描器z方向的运动来保持隧道电流恒定,这时针尖与样品在z轴方向的间距反映了样品表面高度的起伏变化。这就是STM的恒流模式[2]。
目前国内有多家生产扫描隧道显微镜的厂家,内部电子学部分基本上是以DSP芯片为核心、 外部附加高精度A/D或D/A等外围器件构成。由于DSP芯片结构和功能的复杂性,不方便使用和学习,下面介绍一种以Microchip公司生产的PIC16C65中档单片机为核心、外围附加1 6位的A/D转换器MAX195及D/A转换器AD1866器件的扫描隧道显微镜的电子学系统。
2 PIC16C65单片机与MAX195的接口
Microchip公司生产的PIC系列单片机具有哈佛双总线结构,采用了类精简指令集和指令流水 线结构,运行速度非常快,可以完全取代DSP来工作[3]。MAX195是由MAXIM公司生产的16位串行输出A/D转换器,他速度快、功耗低并且具有自标定能力。MAX195主要用于隧道电流的采集。MAX195与PIC16C65的连接及MAX195的外围连接如图1所示
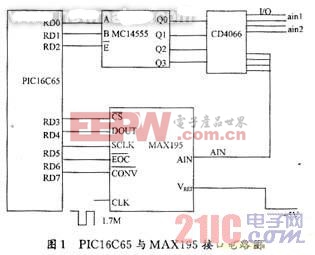
图1中PIC16C65单片机通过通用的I/O口D口的7个管脚与MAX195和MC14555连接。A/D转换过程由PIC16C65的程序控制。本程序采用异步读取方式,即在16位数据转换完成后再读取数据。转换开始时首先置/CONV为低电平启动转换,转换开始后单片机不断检查/EO C管脚的电平是否变低,如果变低说明转换已经结束,单片机通过RD5口构造16个串行输出脉冲送入到MAX195,转换后得到的16位数据通过RD4口逐位送到PIC单片机内进行读取和处理。
MAX195进行A/D转换的子程序如下:

3 PIC16C65与AD1866的接口
AD1866是AD公司生产的性能良好的双通道16位D/A转换器,每个通道由1个参考电压、1个16位的输入寄存器、1个16位的输入锁存器、1个16位DAC和1个输出放大器组成。AD1866工作过程也由PIC单片机的程序来控制。首先PIC通过RA2和RB3口构造输出脉冲,将需要进行 D/A转换的16位数据从高位到低位依此送入AD1866的数据寄存器,然后在LL和LR管脚构造下降沿脉冲,将数据寄存器中的16位数据送进DAC进行D/A转换,并相应地更新DAC的输出。其接口电路如图2所示。

其工作过程如下:首先给步进马达通电,让马达连续运行,向下逐渐靠近样品,直径很小的探针安装在步进马达前面随马达一起运动。当探针快要接近样品时,步进马达改变运行方式,从连续运行方式变为点动状态运行。同时给探针加偏压,一直到能检测出预设的隧道电流时,再将压电陶瓷z轴方向的距离与预设值相比较,可得到该点表面高度。以此可以扫描出全部样品的表面形状,再将数据送入到计算机中,通过一定的图像处理即可得到样品的表面样貌图。
4结语
采用PIC16C65为核心构成的扫描隧道显微镜的电子学系统部分通过与PC机的接口和显示及图像处理程序可以较清晰地显示出金属样品表面的样貌。这种扫描隧道显微镜具有性价比高、图像显示清晰等特点,在精密测量和微驱动及材料研究中都具有广泛的应用前景。
参考文献
[1]张立德.纳米测量学的发展与展望[J].现代科学仪器,1998, (21)
[2]Atherton P D. Nanometre Precision Mechanisms[J]Me asurement Control.1998, 31(3)
[3]俞光昀.PIC系列单片机开发应用技术[M]北京:电子工业出版社,2000
显微镜 应用 隧道 扫描 单片机 PIC16C65 相关文章:
- 基于嵌入式系统自动连续变倍视频显微镜(04-25)
- 数字信号处理(DSP)应用系统中的低功耗设计(05-02)
- SHARC引领第四代通用DSP高端应用潮流(09-27)
- 在应用可编程测控网络设计(03-15)
- 基于dsPIC33F系列单片机的应用程序升级方法(04-03)
- 采用混合时钟模式提高Linux时钟精度的方法(05-10)