基于嵌入式系统自动连续变倍视频显微镜
摘要 介绍了文中嵌入式系统总体设计思路,及在连续变倍系统中应用的嵌入式技术,在降低了成本的同时能快速地实现自动变倍、调焦和检测功能。阐述了电控变倍和自动调焦两方面技术,即机械传动部分采用小模数齿轮实现机械运动和动力的传递,单片机电路控制部分实现计数脉冲的获取和电机的控制。该系统可按预先设定的方式控制电机,实现了视频显微镜的电控变倍和自动调焦,可满足部分工业生产过程在线自动检测的要求,同时为机器视觉检验提供了一种可行的方案。
关键词 连续变倍视频显微镜;自动调焦;电控变倍;嵌入式系统
在20世纪70年代起出现了国产的连续变倍体视显微镜,由于明显优于间隔变倍类型的体视显微镜,从此在体视显微镜领域占据了主导地位。连续变倍体视显微镜有两种基本形式:一是有一组主物镜中间像平面平行于物镜的平面;二是由格里诺发明的机型,其是由两支完全相同的成对物镜,其光轴夹角在11°~14°间,特点是容易校正像差且成本低。因此后者仍是连续变倍体视显微镜的主流机型。
体视显微镜广泛应用于生物解剖、微生物观察、显微外科、矿物结构观察和工业生产。工业主要应用于电子制造业、半导体以及钟表等精细零部件生产、装配、质量检验方面,对于有些工序是必备的工艺装备。尽管体视显微镜是双目观察且连续变倍,立体感强,仍然容易使操作人员产生疲劳感。随着CCD和CMOS图像传感器的出现且成本不断降低,出现了单筒连续变倍视频显微镜。视频单筒显微镜具有视野宽广、直观真实、操作简单且操作人员不易产生疲劳感的优点而发展迅速。在生产线已有取代双目观察的体视显微镜之趋势。
1 连续变倍视频显微镜及智能化
1.1 连续变倍视频显微镜的工作原理
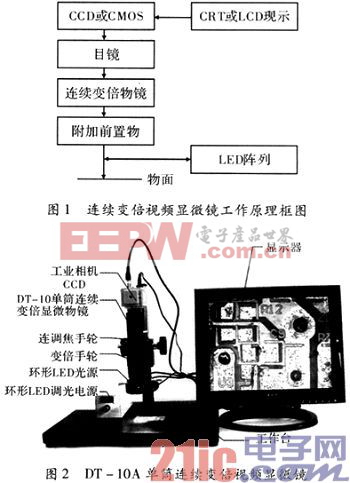
连续变倍视频显微镜(下称视频显微镜),始于双目观察式体视显微镜。其光学系统主要由连续变倍物镜、目镜和附加前置物镜3部分组成,如图1所示。其中连续变倍物镜属于低倍物镜范围,是视频显微镜的关键部件。观测物经过光学系统成像于CCD(或CMOS)的光敏面上,图像传感器把光信号转换成电信号(视频信号),该信号通过电视系统在屏幕CRT屏显或LCD上显示出物体的像。图2为桂电光机电一体化研究所与梧州市澳特光电仪器公司产学合作研发的DT—10单筒连续变倍视频显微镜。在无前置物镜和1×目镜的条件下,变倍比M=1:6.3,0.7~4.5×连续变倍。通过C接口与1/3inch CCD连接后,显微图像在CLD上显示。光学系统还要使用光强可调的LED同轴光照明或环形LED阵列外照明。
1.2 视频显微镜的自动化、智能化改造
(1)问题的提出。机器视觉被工业生产过程在线自动检测广泛应用,连续变倍视频显微镜的“手动调节+视频观察”模式不能适应在线自动检测的要求。
(2)总体设计方案。智能型连续变倍视频显微镜实质是在连续变倍系统中应用嵌入式技术,取代传统计算机来自动控制显微镜动作的自动系统,在降低了成本的同时能快速实现自动变倍、调焦和检测功能,其简洁而实用的技术让取代人工变倍以及电脑变倍的视频显微镜成为可能。从需求看,要具有自动调焦和电控变倍两大功能。1)从文献可知,设计的自动调焦方案思路是光学系统采集到的显微图像经“CCD+PC”检测,步进电机驱动实施。2)电控变倍方案适用于替代手动在变倍手轮上实现不同角度的转动,而达到光学系统连续变倍的目的。3)综合上述思路,形成了文中总体设计方案,如图3所示。

出于成本考虑,系统结构框架采用桂电光机电一体化研究所与梧州市澳特光电仪器公司合作研发的DT—10单筒连续变倍视频显微镜的主体部分,在调焦和变倍上改造而成。
物镜的移动一般使用步进电机驱动,传动机构有齿轮传动、精密丝杠传动和压电陶瓷等。齿轮传动结构较为简单,传动比可调,传动速度快;缺点是:受啮合精度影响,由磨损间隙可造成一定空回失步,传动精度较低。精密丝杠容易实现高精度位移,缺点是移动速度较慢、影响调节速度。压电陶瓷利用压电效应原理,位移精度较高,可用电路控制位移大小;缺点是移动范围较小,只能用作小位移高精度微调。基于连续变倍视频显微镜的景深较大,调焦、变倍的精度要求较低,因此采用齿轮传动机构。
连续变倍视频显微镜的电控变倍采用齿轮传动,两齿轮分别安装在连续变倍视频显微镜的变倍手轮和步进电机轴上,结构简单,使变倍手轮转动角度可控,实现电控变倍。传动比为1:4,传动齿轮模数为0.5。通过齿轮齿条传动,将电机的转动转化为物镜的移动,实现快速调焦。图4为自动单筒连续变倍视频显微镜结构图。
变倍 视频 显微镜 连续 自动 嵌入式 系统 基于 相关文章:
- 基于FPGA+单片机的调焦变倍系统设计(05-09)
- 在FPGA上实现H.264/AVC 视频编码标准(07-23)
- 用FPGA替代DSP实现实时视频处理(08-26)
- DSP+FPGA嵌入式多路视频监控系统硬件平台(04-10)
- 基于DSP的视频采集驱动程序的实现(07-21)
- 未来的视频依赖转码技术(06-08)