基于AVR单片机的自由立体显示背光控制系统
摘要:为实现立体显示,设计并实现了基于单片机的LED背光控制系统。该系统采用单片机ATmega128为控制处理器,加以外围电路,利用RS 232接口实现与PC机人眼跟踪模块的实时通信。同时,充分利用下位机资源,在单片机上实现Kalman滤波,提高人眼定位精度,并利用Kalman预测,将跟踪速率提高一倍,有效减轻了显示器的闪烁现象。
关键词:自由立体显示;LED;ATmega128;RS 232;Kalman滤波
0 引言
人眼视觉是立体的,立体的视觉带给人类的不仅仅是可以判断观看对象的空间状态,它和颜色一起,使这个世界更加丰富多彩、变化万千。2010年伊始,随着立体电影《阿凡达》的热映,在世界各地掀起了一股3D的热潮,3D技术成为各界关注的焦点。三菱、索尼、LG、三星等各大显示器厂商相继推出自己的立体电视,并寄希望于立体电视市场的开发。
立体显示技术经历了多年的发展,无论在显示质量,还是实现方法上都有了很大的进步,自由立体显示由于不需要佩戴任何辅助工具,因此正在成为立体显示发展的方向。其中,以LCD为基础,基于视差的立体显示技术由于技术成熟且实现工艺不复杂,成为最有可能实现商业化的热门技术之一。基于AVR单片机的自由立体显示系统正是在这一技术的基础上,利用特殊的光学部件和LED照明阵列实现的。
Kalman滤波是一种线性最小方差估计,算法采用递推形式在时域内滤波,数据存储量小,预测精度高,适用于对多维随机过程进行估计,这个估计可以是对当前目标位置的估计(滤波),也可以是对于将来位置的估计(预测)。常用于从一组有限的,包含噪声的,对物体位置的观察序列中得到关于物体位置的好的估计。在自由立体显示系统中,单片机在进行电路控制的同时还对人眼位置信息进行Kalman滤波和预测。
1 系统的工作原理及总体方案设计
1.1 立体显示的实现原理
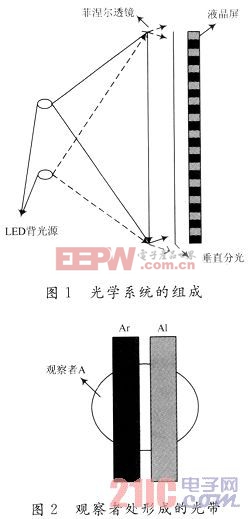
视差立体的实现原理是将一对立体图像分别送入人的左右眼睛,经过大脑融合后就可以产生立体效果。根据这一原理,设计了一款立体显示器,17寸LCD的奇数行和偶数行分别显示左右立体图像,光学部分利用菲涅尔透镜控制光路的走向,垂直分光装置使位于不同垂直位置的两组LED背光源只能分别照亮LCD屏幕的奇数行或偶数行,如图1所示。同时,两组光源的水平位置也有差别,这样就为左右眼分别提供了只能看到奇数行或偶数行的可视区域,如图2所示。当观察者在屏幕前自由移动的时候,通过摄像头探测到人眼的位置信息,用单片机控制LED照明阵列在适当的地方点亮,保证始终提供正确的可视区域,实现自由立体显示。
1.2 基于单片机的Kalman滤波的预测实现
Kalman信号模型包括状态方程和测量方程。状态方程描述了系统当前状态和前一状态的状态转移关系。如下所示:
平稳条件下,Q,R是恒定的。Kalman滤波的过程就是根据观测值和信号模型恢复出原始信号的过程。
滤波器的输出由式(4)给出:
式中: 称为测量过程的革新或残余,它代表了预期的测量值和实际测量值之间的误差;K是增益因子,用于最小化后验均方误差,在滤波过程中会动态发生改变,如果测量更准确K将越大,模型估计越准确K越小。K的值和模型估计误差P相关联,K和P由下面式子迭代算出。
称为测量过程的革新或残余,它代表了预期的测量值和实际测量值之间的误差;K是增益因子,用于最小化后验均方误差,在滤波过程中会动态发生改变,如果测量更准确K将越大,模型估计越准确K越小。K的值和模型估计误差P相关联,K和P由下面式子迭代算出。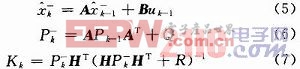

式(5),式(6)为Kalman滤波的预测阶段,使用上一状态的估计,做出对当前状态的估计。式(7)~(9)为Kalman滤波的更新阶段,利用对当前状态的观测值优化在预测阶段获得的预测值,以获得一个更精确的滤波值。
Kalman滤波预测跟踪有一个启动过程,经过若干次迭代后。Kalman滤波才会趋于稳定。在该系统中,采用匀速直线运动模型,状态方程为:
式中:x(n)代表眼睛(左眼或右眼)位置的水平坐标;v(n)代表眼睛运动的速度;t代表时间间隔;wk-1代表这两个变量的模型误差,它的协方差阵定义为: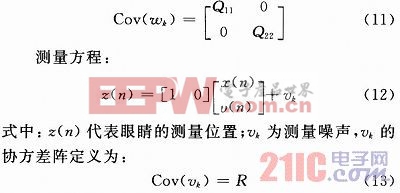
对于模型参数Q11,Q22和R,由PC机辅助计算得到。给定一组测量位置和实际位置,在Q11,Q22,R三维空间按等量的方法选取格点,分别训练不同参数下的Kalman滤波器对检测数据进行滤波,如果滤波后的位置与真实值越接近,就说明这组滤波器参数越优秀。得到了最优参数后,就可以按照前面的介绍,进行不断“预测一修正”的Kalman滤波,获得精度更高的人眼位置(式(8)),并利用式(5)预测t/2时间后的人眼位置,此时增益矩阵:
1.3 系统的总体方案设计
自由立体显示系统由计算机、RS 232通信电路、单片机控制电路、驱动电路和LED照明阵列电路组成,结构框图如图3所示。

上位机完成人眼检测算法,并且把人眼位置信息通过RS 232送给单片机。单片机选择AVR系列中功能最强的ATmega128,主要完成对人眼位置数据的处
显示 背光 控制系统 立体 自由 AVR 单片机 基于 相关文章:
- 蓄电池化成控制系统中显示功能的实现(11-05)
- 基于DSP实现的LCD液晶屏显示技术(06-04)
- 军事指挥系统中VxWorks下汉字显示技术(07-16)
- DSP在LED显示中的应用(08-21)
- 基于Android系统的影音播放器开发(03-25)
- 基于MC9S12XS128的单片机开发板的设计(08-13)