单片机的MODEM通讯
我们经常能见到关于PC的MODEM通讯的文章,但关于单片机MODEM通讯的文章却不多见。现在将我个人单片机MODEM通讯的实践经历写出来供大家参考。
要写单片机的MODEM通讯必须要有两个背景知识,一个是AT命令集,另一个是通用异步接收发送器(UART)。
1.AT命令集
下面介绍我通讯程序例子中涉及到的AT命令。
豹Dn:拨号命令。该命令使MODEM立即进入摘机状态,并拨出跟在后面的号码。D命令是基本的拨号命令,它受到其它命令的修饰可构成MODEM何时拨号以及如何拨号等操作。
豹T:音频拨号。例如,ATDT2245879,其中2245879为电话号码。
豹P:脉冲拨号。例如,ATDP2245879,其中2245879为电话号码。
豹保:标准暂停。我们常常碰到拨打外线电话时需要暂停一下,等听到二次拨号音(外线)之后才能再拨后续的号码。缺省时暂停时间为2s(秒),它由S8寄存器指定。
豹Sn:表示MODEM内部的寄存器。
豹S0:自动应答。如果要求MODEM具有自动应答特性,则应该预先将MODEM的S0寄存器设置为非0。
豹S8:逗号拨号修饰符的暂停时间。该寄存器决定了当MODEM在拨号中遇到逗号(,)时应该暂停的时间。
豹2.通用异步接收发送器UART
深入理解UART内部结构以及内部寄存器各位的含义,详细了解数据发送和接收的过程,有助于编写出高效、稳定的程序。现以GM16C550为例介绍编写基本通讯程序需要知道的寄存器。实际的ADDRESS由具体接线决定。表1为GM16C550寄存器的介绍。
表1 GM16C550寄存器 
(1) 波特率除数锁存器(LSB、MSB)
在通讯之前要进行一些参数初始化,波特率是首先应该考虑的一项。该寄存器是一个16位的寄存器,分为低8位(LSB)和高8位(MSB)寄存器。
当 LCR.7=1,且A2A1A0=000/001时,单片机访问的是波特率除数锁存器LSB/MSB。GM16C550推荐的工作频率是 1.8432MHz。这个频率除以16就是波特率的时钟频率,用于控制发送和接收数据的速度。下面给出波特率除数锁存器值的计算公式:
波特率除数锁存器值=工作频率/(16×期望波特率)=1843200/(16×期望波特率)
表2给出了常用波特率与波特率除数锁存器值。
表2 波特率除数锁存器 
MOV DPTR,#LCR ;除数锁定允许
MOV A,#80H
MOVX @DPTR, A
MOV DPTR,#LSB ;波特率为9600baud
MOV A,#0CH
MOVX @DPTR, A
INC DPTR
CLR A
MOVX @DPTR, A
图 1为GM16C550与RS232接线图。
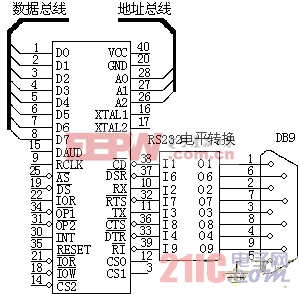
图1 GM16C550与RS232接线图
(2) 接收缓冲寄存器和发送保持寄存器(transmit and receive holding register)
当LCR.7=0,且A2A1A0=000时,读操作单片机访问接收缓冲寄存器(RHR),写操作单片机访问发送保持寄存器(THR)。
(3) 中断允许寄存器(interrupt enable register)
当LCR.7=0,且A2A1A0=001时,单片机访问中断允许寄存器(IER)。
豹IER.0=1,允许接收器数据就绪中断。
豹IER.1=1,允许发送保持寄存器为空时中断。即当从发送保持寄存器把一个字节移到移位寄存器时,产生一个中断,使发送保持寄存器能够接收下一个字节。
豹IER.2=1,表示允许接收有错信息或间断条件中断。
豹IER.3=1,MODEM状态变化中断。
豹IER.4~7,没有使用,设置为零。
MOV DPTR,#IER
MOV A,#01H
MOVX @DPTR,A
(4) FIFO控制寄存器(FIFO control register)
数据发送和接收模式的选择。GM16C550提供了两种模式:FIFO和DMA。其中DMA又有两种模式DMA的模式0、DMA的模式1可供选择。我的举例采用默认的DMA的模式0。感兴趣的朋友可试一试其它模式,这里不再说明。
(5) 中断状态寄存器(interrupt status register)
前面介绍了几种中断,它们在各自的条件下产生中断,UART都会输出一个高电平的中断请求信号,触发同一个中断请求。为了具体判断是哪一种中断,还应该检测ISR,如表3所列。
表3 中断状态寄存器 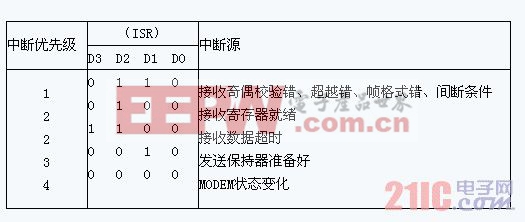
ISR.0=1,表示没有中断产生。
豹ISR.4~5没有使用。
豹ISR.6~7,当采用FIFO的接收和发送模式时,这两位都设置为1;反之,都设置为0。
(6) 线路控制寄存器(line control register)
豹 LCR.0~1,表示发送和接收时的字节长度,如表4所列。
豹LCR.2,这一位与LCR.0~1共同定义了停止位的长度,如表5所列。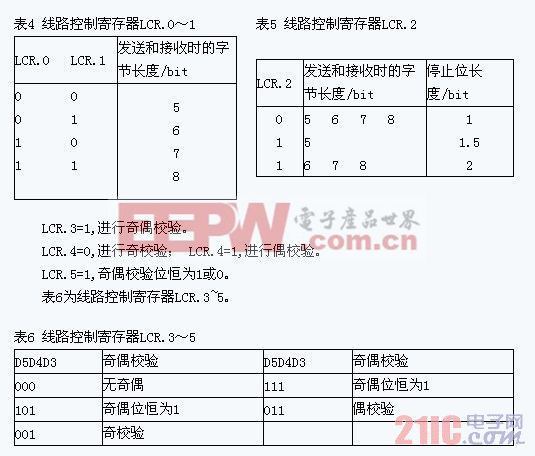
豹LCR.6=1,表示允许间断,即允许发送器寄存器保持一个完整帧时间以上的空号状态。
豹LCR.7,用于区分访问除数锁存寄存器还是访问接收缓冲/发送保持和中断允许寄存器。 MOVDPTR,#LCR;通讯传输长度为8位,停止位为1,;偶校验
MOVA,#1BH
MOVX @DPTR,A
(7) MODEM控制寄存器(MODEM control register)
这是一个MODEM和外设接口的寄存器。
豹MCR.0=1时,强制芯片引脚DTR=0;
豹MCR.0=0时,强制芯片引脚DTR=1。
豹MCR.1=1时,强制芯片引脚RTS=0;
豹MCR.1=0时,强制芯片引脚RTS=1。
豹MCR.2=1时,强制芯片引脚OP1=0;
豹MCR.2=0时,强制芯片引脚OP1=1。
豹MCR.3=1时,强制芯片引脚OP2=0;
豹MCR.2=0时,强制芯片引脚OP2=1。
豹MCR.4=1时,循环返回模式,可用于芯片自测。
豹逼渌位保留。
MOVDPTR,#MCR;异步串口芯片的DTR、RTS引脚送出逻辑低电平
MOVA,#03H
MOVX @DPTR,A
- 用双端口RAM实现与PCI总线接口的数据通讯(05-06)
- 朗谷数字音频处理技术在音频及网络通讯领域的应用(05-19)
- 用FIFO实现DSP间的双向并行异步通讯(08-15)
- 基于VxWorks的系统故障快速恢复设计(01-12)
- 基于Windows CE.NET实现蓝牙通讯模块的几种方法(01-25)
- 基于DSP核信号采集系统通讯接口电路设计(01-16)