能式汽车安全气袋控制系统的设计方案
在我国,随着汽车的普及,交通事故及伤亡人数也在逐年上升。如何在发生汽车碰撞事故时,有效地保护乘员生命就成为迫切需要解决的问题。作为与安全带配合使用的一种保护装置--安全气袋可以有效地保护乘员,已经在欧美等国得到普及,成为保护乘员的主要装备1,并已成功挽救了很多人的生命,显示了它的实用性。作为气袋系统核心部件的控制系统是各生产厂家严格保密的核心技术,因此研制自己的控制系统就成为我国发展汽车安全气袋、解决乘员保护问题的关键。
气袋控制系统的任务是准确判断出事故的碰撞强度,并点爆气袋。控制系统主要有机械式、模拟电子式、智能式几种1。第一、二代的机械式和模拟式控制系统,由于结构的局限,灵活性有很大限制,应用正在减少。现在大部分系统都采用第三代的带微处理器的智能控制系统。它使用单片机对电子式加速度传感器测得的信号进行计算,认为发生了碰撞并且达到一定强度时,输出点火脉冲引爆气体发生器,迅速产生大量气体充满气袋3。智能控制系统的控制算法由软件实现,极大地提高了算法的灵活性,而且具有记录事故信息和与计算机通讯等前两代控制系统无法实现的功能。
本文在对国外先进控制系统研究的基础上,提出了智能式控制系统的设计方案,并对其进行了台车和实车试验,证明该控制系统可以准确地判断撞车事故,点爆气袋。
1 控制系统设计
1.1 气袋控制系统的要求
由于工作任务的特殊性,汽车安全气袋控制系统除了必须具备点火判断、发出点火信号的功能外,还应满足以下几点要求2。
(1)抗干扰能力强
气袋系统若发生误点爆,不仅会对乘员造成惊吓,甚至可能引发事故,因此必须有很高的抗干扰能力。如汽车受到粗糙路面干扰时会产生较大的减速度,系统要能识别出这种状况,不点燃气袋。
(2)高可靠性与工作稳定性
由于汽车的工作环境复杂以及不允许出现点火失败的工作要求,气袋控制系统必须具有较高的可靠性与稳定性。另外,碰撞后,电源可能首先被撞坏,因此要求系统能在掉电后继续工作数百毫秒。
(3)结构紧凑
整个系统除了要满足上述要求外,还要尽量减小体积,少用元器件,以减小系统的复杂程度,提高可靠性。同时也可减少系统的耗电量,以尽量维持掉电后的工作。
1.2 控制系统总体方案
本控制系统由硬件和软件两部分组成。图1是控制系统的组成框图。

气袋控制系统硬件由两部分构成,一部分是车载部分的电子控制单元,包括控制单片机、传感器、点火电路、指示灯电路等;另一部分是地面部分,包括串行通讯电路和计算机系统,以及打印机等后处理设备。
相应于硬件部分,控制系统软件也由两部分组成,一部分是单片机部分,包括实时采集与控制软件和联机通讯软件;另一部分是微机部分,包括联机通讯软件和后续数据处理软件。
气袋控制系统工作过程是:将系统固定于汽车上,上电后系统开始工作,在点爆气袋、记录事故数据后或系统自检出现故障时,由上位机(微机)通过RS-232接口和控制系统进行通讯,读取碰撞记录、故障记录并进行分析处理。
1.3 控制系统硬件
电子控制单元是整个控制系统的重要硬件,负责系统的管理、电源、加速度测量、气袋点火驱动、指示灯显示、数据采集等功能。
1.3.1 总体方案
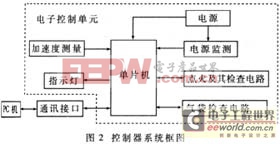
气袋控制系统硬件结构框图如图2所示。电控单元部分由电源、微处理器、传感器及滤波、点火及其检测电路、气袋检查电路等部分组成。考虑到系统与外界的联系,还要有指示灯及通讯接口。
1.3.2 单片机
根据气袋控制系统的要求,选择MOTOROLA公司的MC68HC11E9单片机,它具有以下性能4:
·有512字节RAM:可以在发生碰撞时采集一定数量的加速度信号,作为判断点火的依据。
·有512字节EEPROM:所记录的事故数据可在失去电源的情况下长久保存,以备事故分析。
·有12K字节EPROM:可以把程序固化在单片机中而不用外扩存储器,减少了系统的复杂程度,提高可靠性。
·有足够数量的A/D转换通道:可以直接对加速度信号及气袋和点火电路的检查结果进行A/D转换,从而节省了专用A/D芯片,提高了系统的可靠性。
·具有异步串行通讯接口,可以实现系统与计算机的通讯。
可见该型号单片机具有气袋控制系统所需的多种性能,可大大节省各种专用芯片的数量,减小系统的复杂程度。单片机的时钟频率选择为3MHz,这个速度可完全满足气袋控制系统的工作要求。
1.3.3 电源
在点爆气袋的瞬时,系统的电流相当大,如果电源选择不当,无力提供大的瞬时电流而引起点火电压大幅降低,就可能无法点火甚至因电源电压过低而使系统停止工作。汽车用的电瓶可以提供短时间、高强度的电流,一般情况下完
- DSP和PBL3717A构成的步进电机的控制系统(04-01)
- 基于DSP的新型弹载控制计算机(04-05)
- 基于TMS320VC5509A的语音识别与控制系统(06-17)
- 基于DSP的智能刹车控制系统研究(07-29)
- 基于DSP的逆变电源控制系统设计(08-11)
- 基于DSP的混合悬浮控制系统的硬件设计(01-13)