便携式多功能量水仪的研制
目前普遍使用的量水仪(或水位仪),要么功能单一(或功能较少),在实际应用时还需要额外的辅助设备;要么功能较全,但体积较大,不方便携带,功耗也较大,供电设备还要额外配置。基于单片机开发的各种量水仪,以其成本低、方便实用、精确而被广泛应用在水利工程中。为此,笔者结合实际的需要,开发研制了一种基于AT89C51单片机的便携式多功能量水仪。该仪器功能集中,不仅能实现信号的自动调理,而且还能实现数据的通信、报表打印、密码及K/N参数的设置以及掉电保护等多种功能。更为突出的是,该仪器能与多种液位传感器直接接口,携带方便,供电简单,功耗比较低。
1系统的硬件设计
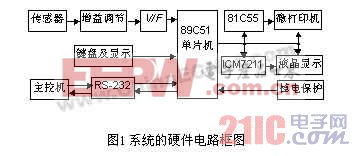
系统的硬件主要由AT89C51单片机、增益调节电路、LM331V/F转换器、81C55I/O口扩展器、两片ICM7211四位液晶显示器、CD4051八选一模拟开关、CD4052双四选一模拟开关、4′4薄膜触键及六位液晶显示器LCD等组成,其框图如图1所示。
1。1信号增益调节电路
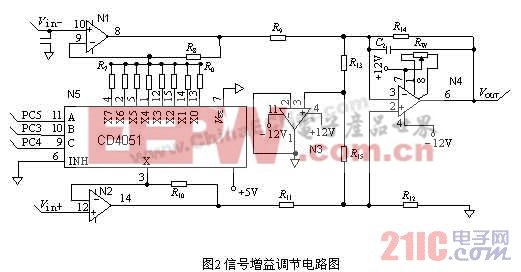
增益信号是由程序控制的,它根据待测量信号幅值的大小来改变放大器增益,以使不同幅值范围的输入信号都能放大到A/D精确转换所需的幅值范围。本仪器设计的输入量程为0~5V,分辨率是1。0mV。为了保证测量精度的一致性,设计了以一片CD4051八选一模拟开关、若干高精密电阻和一个低功耗运算放大器OP07等组成程控增益放大电路。鉴于实际场合中常用的液位传感器输出满量程电压一般为60mV、200mV、2V、5V等几种,故设计了0~5V的量程,具体电路组成如图2所示。其中N1、N2组成同相关联差动放大器,N3为电压跟随器,主要用来抑制共模信号,N4是输出差动放大器,整个电路的增益可通过改变权电阻网络R0~R7来调节。
1。2信号A/D转换电路
为了适应便携式仪表电池供电、功耗低等特点,采用了功耗低、高精度、供电简单的V/F转换芯片LM331组成电压-频率(10V-100kHz)的A/D转换电路,其输出频率与输入电压的关系为

通过AT89C51的T0计数器(其中T1作定时器用)计算出fOUT,从而得到输入Vin,进而算出水位值Hi(Hi~Vin),具体如图3所示。
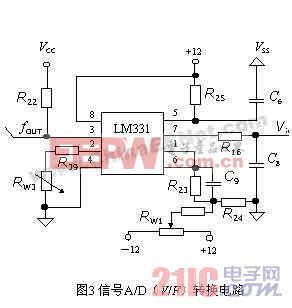
在该电路中,电阻R16为80kW±10%,它主要是使LM331的输入端7脚产生偏流,以抵消6脚偏流的影响,从而减少频率偏差。R39和可调电位器RW3的作用是调整LM331的增益偏差和由R23、R25及C6引起的偏差。当6脚、7脚的RC时间常数匹配时,输入电压的阶跃变化将会引起输出频率的阶跃变化,如果C8比C9小得多,那么输入电压的阶跃变化可能会使输出频率瞬间停止。6脚的47W电阻R23和1。0mF电容器C9并联用以产生滞后效应,使V/F转换获得良好的线性度。
1。3低功耗设计
该仪器全部芯片均选用CMOS低功耗芯片,其余外围电路采用了低功耗设计,并设计了4×4触摸薄膜键盘及六位LCD液晶显示器作为人—机接口。在软件设计上,整个系统采用了等待和掉电工作的节电运行机制,功耗较低。
2系统的软件设计
软件是系统的指挥中心,由它来配合控制完成各种预定功能。为了充分发挥AT89C51优越的性能价格比,在设计上尽量做到硬件“软化”,使系统硬件设计得到简化。系统软件采用MCS-51汇编语言编写,采用了模块化结构设计。为增强系统的实时性,对那些偶发事件采用中断方式处理。
2。1系统的软件算法
在明渠量水建筑物中,较为典型的是巴歇尔水槽。在自由流情况下,巴歇尔水槽的水位H和流量Q关系是简单的二值函数。利用回归分析技术,可以求出H~Q流量经验公式。为了便于分析和应用,我们在水工实验中主要是针对自由流情况的,从而得到大量的H~Q曲线数据组。
巴歇尔水槽在自由流时的流量公式为
Q=K·HN(2)
式中,Q为流量(m3/s),K、N为流量系数,H为上游水头高(m)。由于流量经验公式是指数型函数,故先对巴歇尔槽流量公式两边取对数,得
lnQ=lnK+N·lnH(3)
设y=lnQ;a=lnK;b=N;x=lnH
式(3)可写成
y=a+b·x(4)
然后,利用实测的大量独立(H,Q)数据,求出回归系数a、b的最小二乘估计量(亦即为a、b的无偏估计量),从而得到回归函数的估计
(5)
由y=a+b·x+ε,ε~N(0,δ2),可知y随x变化趋势的大小主要受参数b的影响,故建立如下假设检验:
H0:b=0;H1:b≠0(6)
用以检验线性回归效果的显著性水平。符合实际要求后,则得到流量系数K、N的估计值。有了流量经验公式,系统就可根据所测的水位H值来计算出流量值Q。
2。2系统的主程序设计
主程序主要用于系统的控制和管理。系统加电后,AT89C51自动上电复位,开始运行主程序,主程序框图见图4所示。系统首先显示“0-×&ti
- 嵌入式网络型门禁控制系统的研制(07-30)
- 基于ARM处理器的网关通信模块研制(07-17)
- 嵌入式雷达发射机故障监测系统的研制(06-08)
- 智能楼寓火灾报警系统的研制(03-31)
- 80C196单片机多功能教学实验板的开发与研制(03-21)
- 串口现场评分系统的研制(03-20)