����Ŀ������㷨�ڳ��غ��ײ��״��βϵͳ�е�Ӧ��
�õ�״̬���ơ�һ��ģ����Ч�ĸ�����״̬��ֵ��Э����ļ�Ȩ�ۺϼ���������Ҫ���á�IMM����Ʋ���Ϊ����ͬƥ��ͽṹ������ģ�ͣ���ͬģ�͵Ĵ��������ܶȣ�һ���������ǻ���ģ�;��е�ˮƽ��������������ģ�;��нϸ�ˮƽ����������ģ��֮����л��ṹ��ת�Ƹ��ʡ��������Ļ���Ŀ��ĸ����㷨��ȣ���������Singer���㷨��������ƣ�IE���㷨����ά�˲���VD���㷨�ȣ�������ģ��IMM���㷨���ŵ���������Ҫ������������ӻ�����10�ݣ��Ӷ����������ģ���ڻ�����ǻ���֮���л��������������㷨ԭ�����£�
�ٶ���r ��ģ�ͣ�

����X��k��ΪĿ��״̬������AjΪ״̬ת�ƾ���GjΪϵͳ�������þ���Wj��k���Ǿ�ֵΪ�㣬Э�������ΪQj�İ��������С�
����һ�������ɷ�����������Щģ��֮���ת���������ɷ�����ת�Ƹ��ʾ���Ϊ��

����Z��k��Ϊ����������HΪ�۲����V��k��Ϊ������������֪�䷽��ΪR��k����W��k����V��k�������ֵ���������
IMM�㷨�ɹ�������4 �����衣
����1 ���뽻����
������ģ�ͣ�k-l��ʱ�̵��˲�ֵ��ģ���ʣ����㽻����Ϻ���˲���ʼֵ������ģ��1 ���˲���ʼֵ���˲�����ֵX 01
��k - 1������Э�����1��k - 1����ģ��2 ���˲���ʼֵ���˲�����ֵX 02
��k - 1�������������P02
��k - 1������ϵͳ�ڣ�k-1��ʱ��ģ��1 ����Ϊ��1��k - 1�����˲�ֵX1
��k - 1�����������Э����ΪP2��k - 1����ģ��2 �ĸ���Ϊ��2��k - 1�����˲�ֵΪX 2
��k - 1����ϵͳ�������Э����ΪP2��k - 1�������һ���ƹ㵽r ��ģ�ͣ�������rģ�͵��˲���ʼֵΪ��

����2 ģ�������˲���
��Ӧ��ģ��Mj��k������X 0j
��k - 1|k - 1����P0j��k - 1|k - 1����Z��k����Ϊ������п������˲���
������Ԥ�ⷽ�̣�

i = 1r��j��k��cj_������j��k��Ϊ�۲�Z��k������Ȼ������

ͼ2 ΪIMM�㷨�ṹԭ��ͼ

4 �����˶�ģ�ͷ�����IMM�㷨���ٷ���
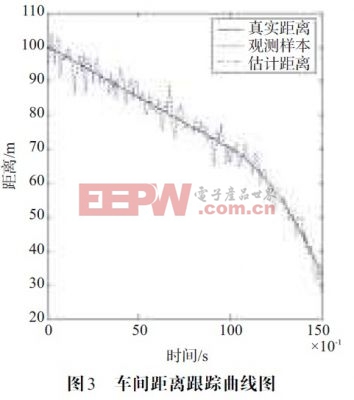
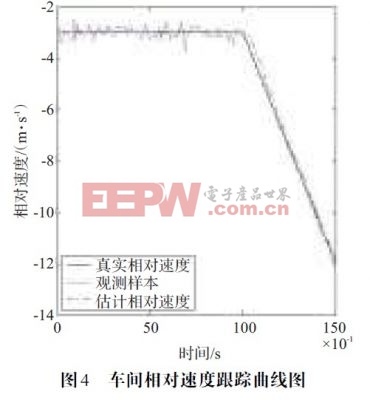
������ƣ������������ڵ�·��ͬ����ʻ����0~10 s ʱ����������������ֱ���˶����ɰ�װ�ں��ϵij��غ��ײ��״������ǰ���ľ���Ϊ100 m������ٶ�Ϊ-3 m/s����λ��2�㡣
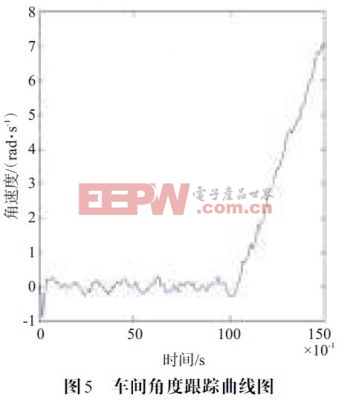
��10~15 s ʱ��ǰ������ƫת�������ԽǼ��ٶ�Ϊ1�� s2��
���٣���ǰ����������Լ��ٶ�Ϊa = -1.8 m/s2���״��ɨ������ΪT=0.1 s��ϵͳ����Ϊ�Ҧ� = 0.3 m/s���Ҧ� = 0.3��/s���������Ϊ��1 = 1 m���2 = 0.5 m/s���3 = 0.2��/s��
��������ֱ���˶�ģ�ͣ�


�������ؿ��巽���Ը����˲������з���������������Ϊ400 �Ρ���������Matlab7.0 ����Ľ����
��ͼ3~ͼ6 ���������������㷨�ܹ���Ч�ظ���ǰ���������˶���Ϣ����������С�����Ƚϸߡ�

5 �ܽ�
�ص��о��˽�����ģ�ͻ���Ŀ������㷨�ڳ��غ��ײ��״��βԤ��ϵͳ�е�Ӧ�ã����ܻ���Ŀ������㷨ԭ���Ͳ��裬���Ը��ٹ�·����ʻ������Ϊ������з��棬��������㷨���нṹ��������С�����Ƚϸߵ��ŵ㣬�ܹ���߳����״��βԤ��ϵͳ��ʹ��Ч�ʣ��Ӷ���߳�����ʻ�İ�ȫ�ԣ�����һ����Ӧ�ü�ֵ��
������ģ�� Ŀ������㷨 ��βϵͳ ������£�
- Windows CE ���̡��̺߳��ڴ����(11-09)
- RedHatLinux�������Ž̳�(5)(11-12)
- uClinux����(11-09)
- openwebmailV1.60��װ��ѧ(11-12)
- LinuxǶ��ʽϵͳ����ƽ̨ѡ��̽��(11-09)
- Windows CE ���̡��̺߳��ڴ����(��)(11-09)