图7 转速计算
计算公式如下: 。其中:f为电频率,P为电机极对数
。其中:f为电频率,P为电机极对数
角度估算
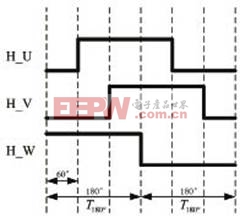
与方波控制不同,正弦波控制中角度为连续变化,而BLDC中常见的3个霍尔传感器仅仅能提供6个角度信息,即0°,60°,120°,180°,240°,300°,其他角度信息无法直接获得。通常采用平均速度法,假设在一定时间内电机速度平稳,利用前次霍尔换相时的角度与速度信息插值得到其他角度信息,如图8所示。
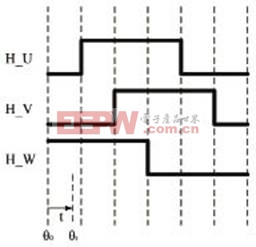
图8 角度估算
 ,由此可见电机的转速波动将直接影响角度计算的误差,在方案中利用相邻3次180°换相时间的平均值来计算转速信息,如图9。
,由此可见电机的转速波动将直接影响角度计算的误差,在方案中利用相邻3次180°换相时间的平均值来计算转速信息,如图9。
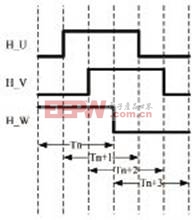
图9 多次平均法计算转速
即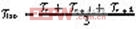 ,以此减少转速波动引起的角度误差。
,以此减少转速波动引起的角度误差。
转速PI
转速控制采用PI调解器,输入为转速给定及转速反馈,输出为开关损耗最小正弦PWM的幅值Modulation。公式如下:
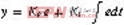
其中: 为比例增益,
为比例增益, 为积分增益,y为PI调解器输出。具体实现时,积分环节添加抗积分饱和功能,限制积分器输出的最大、最小值,同时对整个PI调解器的输出值增加饱和限制,实现框图如下。
为积分增益,y为PI调解器输出。具体实现时,积分环节添加抗积分饱和功能,限制积分器输出的最大、最小值,同时对整个PI调解器的输出值增加饱和限制,实现框图如下。
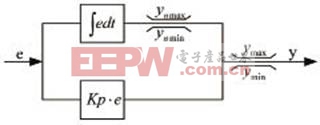
图10 PI调解器框图
启动
直流无刷电机启动之前,转子处于静止状态,仅仅能利用霍尔传感器得到电机的绝对位置信息,由于不存在换相,无法得到电机转速信息,因此无法利用平均速度法计算正弦控制所需的角度信息。所以在电机启动阶段,无法直接切入正弦控制方式,在此采用方波控制方式启动。当电机启动后并获得可靠的换向信息后,即可切入正弦波控制。为了防止出现较大的转速波动,需要注意切换前后电流的相位及幅值均平稳过渡。
理想切换前后的电流波形图11如下。
超前角调整
由前面内容可知,霍尔传感器的输出反映转子的反电势信息,依据霍尔状态生成的正弦波相电压与转子反电势同相位。而由于电机为感性负载,因此电机相电流滞后于相电压。即电机相电流滞后于反电势。而霍尔最大转矩输出时,电机相电流与反电势同步,因此需要调整电压相位,使生成的相电压超前于反电势,即超前角Δ。适当调整Δ,可使相电流与反电势同相位,提高输出转矩,提高系统效率。超前角的调整可通过实验形式手动调整,或者采用一定的算法自动调整。
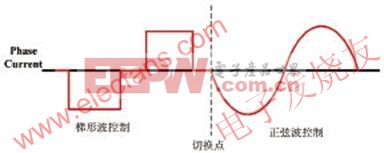
图11 方波控制向正弦波控制的理想切换
实验结果
本文提出的控制方法具体实现时采用Infineon的高性能 8位单片机XC866。XC866内部集成专用电机控制单元CCU6E(提供专用BLDC控制模式)以及高性能ADC模块,是控制直流无刷电机的理想选择。电机为一台额定功率35W的直流无刷风机,极对数:4。启动时采用方波控制,当速度平稳后切入正弦波控制。图12为运行于开关损耗最小正弦PWM控制下的电机相电流。
图12 采用开关损耗最小正弦波控制的BLDC相电流
小结
本文介绍了一种基于开关损耗最小正弦PWM的直流无刷电机正弦波控制方案,并基于Infineon高性能8位单片机XC866进行了系统实现及验证。与传统的方波控制相比,由于采用正弦波驱动技术,电机运行噪声低,且开关损耗较SPWM减少1/3,可以很好的满足直流无刷风机应用中对噪声以及效率的要求,因此此类控制方案将有很大的应用前景。