最小正弦PWM的直流无刷电机控制方案
传统的直流无刷电机采用方波控制方式,控制简单,容易实现,同时存在转矩脉动、换相噪声等问题,在一些对噪声有要求的应用领域存在局限性。针对这些应用,采用正弦波控制可以很好的解决这个问题。
直流无刷电机的正弦波控制简介
直流无刷电机的正弦波控制即通过对电机绕组施加一定的电压,使电机绕组中产生正弦电流,通过控制正弦电流的幅值及相位达到控制电机转矩的目的。与传统的方波控制相比,电机相电流为正弦,且连续变化,无换相电流突变,因此电机运行噪声低。
根据控制的复杂程度,直流无刷电机的正弦波控制可分为:简易正弦波控制与复杂正弦波控制。
(1)简易正弦波控制:
对电机绕组施加一定的电压,使电机相电压为正弦波,由于电机绕组为感性负载,因此电机相电流也为正弦波。通过控制电机相电压的幅值以及相位来控制电流的相位以及幅值,为电压环控制,实现较为简单。
(2)复杂正弦波控制:
与简易正弦波控制不同,复杂的正弦控制目标为电机相电流,建立电流环,通过直接控制相电流的相位与幅值达到控制电机的目的。由于电机相电流为正弦信号,因此需要进行电流的解耦操作,较为复杂,常见的为磁场定向控制(FOC)及直接转矩控制(DTC)等。
本文将主要介绍简易正弦波控制的原理及其实现。
简易正弦波控制原理
简易正弦波控制即通过控制电机正弦相电压的幅值以及相位达到控制电机电流的目的。通常通过在电机端线施加一定形式的电压来使绕组两端产生正弦相电压。常见的生成方式为:正弦PWM以及空间矢量PWM。由于正弦PWM原理简单且便于实现,因此简易正弦波控制中通常采用其作为PWM生成方式。图1为BLDC控制结构图,其中Ux、Uy、Uz为桥臂电压,Ua、Ub、Uc为电机绕组的相电压,以下对于不同种类的PWM调制方式的介绍将基于此结构图进行。
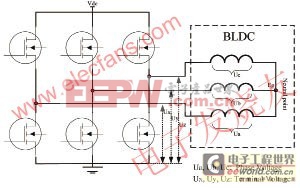
图1 直流无刷电机控制框图
(1)三相正弦调制PWM
三相SPWM为最常见的正弦PWM生成方式,即对电机三个端线施加相位相差120度的正弦电压信号,由于中性点为0,因此电机相电压也为正弦,且相位与施加的正弦电压相同。如图2所示。
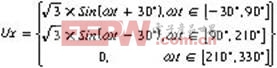
图2 三相调制SPWM端线电压
(2)开关损耗最小正弦PWM
与常见的SPWM不同,采用开关损耗最小正弦PWM时,施加在电机端线上电压Ua、 Ub、Uc并非正弦波电压,此时电机中心点电压并非为0,但是电机相电压仍然为正弦。因此此类控制方式为线电压控制。见图3:

图3 开关损耗最小正弦PWM端线电压
其中Ux、Uy、Uz为电机端线电压,Ua、Ub、Uc为电机相电压,可见相电压相位差为120度。Ux、Uy、Uz与Ua、Ub、Uc的关系如下:

合并后,Ux,Uy,Uz如下: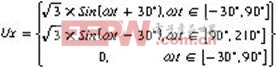

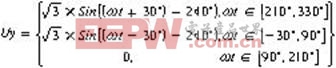
可见采用开关损耗最小正弦PWM时,Ux,Uy,Uz相位差120度,且为分段函数形式,并非正弦电压,而电机相电压Ua、Ub、Uc仍然为正弦电压。且在120度区内端线电压为0,即对应的开关管常开或常关。因此与三相正弦PWM相比,开关损耗减少1/3。
通过控制Ux,Uy,Uz的相位以及幅值即可以控制Ux,Uy,Uz,实现控制电流的目的。
直流无刷电机简易正弦波控制的实现
系统结构
系统结构如图4所示。工作原理如下:霍尔输入信号经过自动滤波及采样处理,得到可靠的换相信号,此信息可被用作估算转子角度以及转速。速度PI调解器根据给定转速值以及反馈转速值计算正弦PWM的Modulation的大小。位置估算单元利用转速以及换相信息估算转子位置角Angle。通过超前角调整单元,补偿超前角Δ,得到Angle。SPWM单元利用Modulation 以及Angle信息生成开关损耗最小SPWM,输出到逆变单元。以下内容介绍了各单元原理及实现。
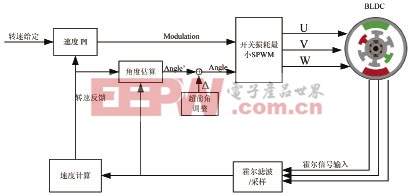
图4 系统框图
开关损耗最小正弦PWM的生成
由于Ux,Uy,Uz相位相差120度,因此以Ux为例进行分析。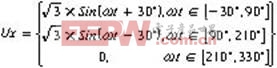
Ux为分段函数, 与
与 为正弦函数且以
为正弦函数且以 对称。仅需实现其中一段,另一段对称处理即可。的实现:
对称。仅需实现其中一段,另一段对称处理即可。的实现:
因此仅需要利用0-120度的正弦表即可以实现,即 ,其中M为幅值。Uy,Uz的实现与Ux相似,相位差为120°。
,其中M为幅值。Uy,Uz的实现与Ux相似,相位差为120°。
通过控制M和x即可控制电机相电压的幅值及相位。
开关损耗最小正弦PWM控制与霍尔位置传感器的关系
通常直流无刷电机采用霍尔传感器定位转子位置,由于传统控制方式为方波控制,因此3个霍尔传感器即可满足要求。霍尔传感器的位置与转子反电势之间的关系见图5,即霍尔传感器安装于反电势为30°、90°、150°、210°、270°、330°的位置。具体霍尔输出值与霍尔的具体安装方式相关。
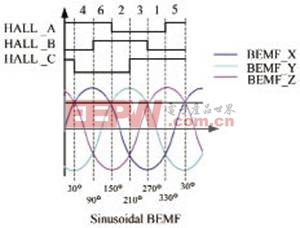
图5 BLDC霍尔传感器输出与反电势之间的关系
采用开关损耗最小正弦PWM控制BLDC时,电机端线电压与霍尔传感器输出之间的关系示意图如图6。
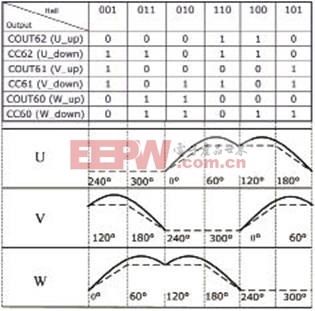
图6 采用开关损耗最小正弦PWM时,端线电压与霍尔状态的关系
由图2可知,采用开关损耗最小正弦PWM时电机端线电压超前于相电压30°,因此可得采用正弦波控制时电机相电压与反电势同步。
由于相电压超前于相电流,因此相电流滞后于反电势。
转速计算
转速计算依赖于霍尔传感器,理想状态下相邻两个霍尔状态的间隔为60°,实际应用中由于存在安装误差,实际间隔并非60°,会引入计算误差。本文档中采用一个霍尔传感器的输出作为转速计算参考,如图7所示。其中高低电平分别为180度,不会引入安装误差。利用此信息即可计算电机转速。
- 基于DSP的直流无刷电机控制器的硬件设计(01-01)
- 三相直流无刷电动机变频控制的远洋捕捞装置电路设计(12-21)
- 四轴飞行器直流无刷电机驱动:反电势过零检测及程序(12-14)
- 基于DSPIC的工业控制系统的设计(03-25)
- 直流无刷电机控制器的硬件设计(07-25)
- 基于单片机的直流无刷电机控制系统设计(11-10)