基于CORTEX-M3和CAN的印染机同步控制系统
V0为主动电机单元的D/A输出电压;Fi为张力传感器的输出;Ki为VOUT输出对张力传感器输出反馈Fi的灵敏性。通过输出反馈Fi,在电机的控制端组成了一个小的闭环系统。张力传感器示意图如图4所示。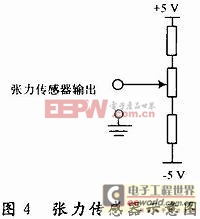
张力传感器反馈调节同步的基本原理:在正常状态,传感器的触点停在中间状态,这是传感器的输出电压为零,当电机转速加快,造成布匹的张力变大时,会造成张力传感器的触点向下移动,这是传感器的输出会变为负值,这是根据式(1),Vout的值会减小,也就减慢了相应电机的转速。这样就可以达到同步的目的。
(4)对故障的处理:在实际的工业生产过程中,不能绝对保证系统会毫无故障的运行,根据以往的印染联合机的生产经验,张力传感器是里面可能会出故障部分,所以根据实际情况,在设计了张力传感器的共享机制,以及电机输出通道的自由配置功能,如果张力传感器Fi不能够正常工作,也就是说它所对应输出(Vout),没有输出调节功能。这时单元控制器会把他相邻的电机控制电压(Vout)i-1输出到(Vout)i。
3 系统主要部分的的软件设计
软件设计采用模块化的软件设计思想,主要实现以下几个模块:主机人机交换界面,系统运行监控模块,各单元控制器CAN总线通信模块,传感器数据采集模块,单元控制器电机控制调节模块,故障分析判断处理模块以及运行数据保存模块。其中CAN总线通信模块,以及各模块间的协调是难点。
3.1 CAN总线通信模块设计
CAN总线通信模块的主要作用是传输主控制器发出的控制命令,以及各单元控制器上传各自的状态数据。CAN节点收到数据后对数据进行解析,得到相应的命令与数据。
CAN总线节点的软件设计主要包括3部分:CAN节点初始化、报文发送和报文接收。初始化程序设计对于CAN总线节点的正常工作相当重要。它主要包括工作方式、时钟输出寄存器、接收屏蔽寄存器、接收代码寄存器、总线定时器、输出控制寄存器和中断允许寄存器的设置。
3.2 系统各软件模块间的工作协调
(1)主控制器通过把控制命令发送到CAN总线上面,相应节点接收并提取相应的命令,按照命令进行相应的操作。
(2)各单元控制器循环采集各张力传感器的数据,根据数据时时调整相应电机的工作状态。
(3)各单元控制器每隔一定时间把各自下属的8个电机状态通过CAN总线发送给主控制器,主控制器提取里面的状态信息,记录各节点的状态信息,并显示在人机界面上面。
(4)人们可以根据具体的情况设置各个电机的工作状态。
4 结语
从系统的原理设计可以看出,这种印染联合机设计,采用主频为72 MHz的处理器,可以把数据的处理在各单元控制器上面完成。采用由张力传感器组成的最小反馈调节系统,保证了系统的时时同步。改变了把状态信息传递各总控制器后,由总控制器实施同步的大循环反馈方式。另外,这种设计采用了集成度比较高的MCU,有12位的A/D,D/A转换通道,这样系统就没有外围采样电路,避免了工厂复杂环境对系统的影响。
总之,这种印染联合机的设计实现了现有高性能处理器与先进的CAN总线控制网络的结合,并且硬件设计简单,抗干扰能力强,软件模块化设计。系统采用小的反馈回路,一方面减少了总线上面的数据流量,另一方面避免了总线上面的传输延时,使得电机同步更加及时准确。
- 漫谈TMS320F28027中两种A/D采样方式的实现方法(06-12)
- 基于单片机的智能油温检测报警系统设计(02-26)
- 基于AVR单片机的智能小车的设计与制作(11-22)
- 基于单片机的学生公寓用电管理系统设计(01-11)
- 基于AT89S52和K9F6408UOA的语音数字系统(01-11)
- 嵌入式远程心电监护系统的设计(12-23)