基于S3C2410的嵌入式图象传输系统设计
1 引言
如何更好的获得监控现场的图象数据一直是棘手的一个问题,传统的方法是采用CCD摄象机获取现场的视频信息,这种方法易于实现,但成本较高。随着 ARM系列处理器应用的越来越广和基于linux的嵌入式技术的迅速发展,利用linux自身带有的TCP/IP协议来实现远程监控、图象传输已成为可能。本文提出的正是一种这样的方法,利用市场上很常见的中星微系列的USB摄象头来得到现场的图象数据,利用linux内核中的Video4Linux编程接口函数采集图象,并把得到的图象通过Internet传输到上位机PC上,在PC上实现图象的保存和显示。
2 硬件系统设计原理
系统的硬件功能框图如图1所示,CPU采用的是三星公司的S3C2410。该处理器内部集成了A R M 公司A R M 9 2 0 T 处理器核的3 2 位微控制器,并带有独立的16KB的指令Cache 和16KB的数据Cache、L C D 控制器、R A M 控制器、NAND 闪存控制器、3路UART、4路DMA 、4路带PWM 的Timer、并行I/O口、8路10位ADC、触摸屏接口、I2C接口、I2S接口、2个U S B 接口控制器、2路SPI,主频最高可达203MHZ。在此基础上,平台还进行了相应的配置和扩展,配置了4MB16位的Flash和8MB32位的 SDRAM,通过以太网控制芯片DM9000E扩展了一个网口。引出了一个UART接口,通过RS232可以和宿主机做串口通讯。并引出了一个HOST USB接口,通过在USB接口上外接一个带USB的摄象头将采集到的图象数据放入输入缓冲区中。对缓冲区的数据进行处理,最后通过网口发送到 Internet上,在PC上保存和接收。
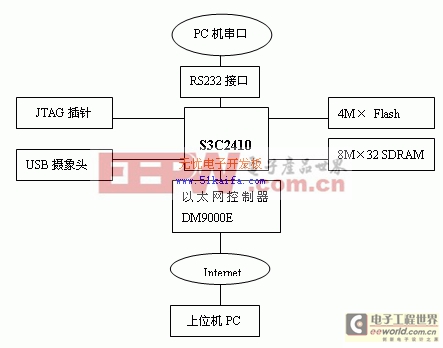
图 1 S3C2410系统平台的硬件功能框图
3 软件系统设计
本文的软件系统设计采用C/S(客户机/服务器)模式,以S3C2410平台作为服务器,以PC作为客户端。服务器的主要任务是把得到的图象数据发送到Internet上去,客户端的任务主要是从Internet上接收得到的数据,并把数据以保存成文件。下面分别讨论两者的具体实现。
3.1 服务器端软件系统设计
3.1.1 建立宿主机开发环境
本文以PC为宿主机,并带有RedHat9.0系统,开发环境就建立在这个平台上,其主要包括:交叉编译器的的选择和安装、NFS和TFTP服务器的配置等。
对于嵌入式系统的开发,由于没有足够的资源在目标板上运行开发工具和调试工具,所以通常采用交叉编译调试的方式。开发时使用宿主机上的交叉编译、汇编及连接工具形成可执行的二进制代码。然后把可执行文件下载到目标机上运行。本文采用的交叉编译器为arm-linux- gcc,具体安装不再赘述。为了方便调试和下载烧写,可让宿主机支持NFS和TFTP服务器。需要特别说明的是为了支持TFTP服务器需要在安装 RedHat9.0时须选择完全安装,如果没有选择完全安装,需要将第三张光盘里面的tftp-server-0.32-4.i386.rpm和 tftp-0.32-4.i386.rpm安装到宿主机下。
3.1.2 摄象头驱动程序的实现
系统采用的是最普通的USB摄像头,主芯片为中星微ZC0301P。这种摄象头的一个特点是可以实现硬件JPEG编码。其驱动程序的编写重点包括下面的内容:提供基本的I/O 操作接口函数open、read、write、close的实现、对中断的处理实现、内存映射功能以及对I/O 通道的控制接口函数ioctl的实现等,并把它们定义在struct file_operations中。这样当应用程序对设备文件进行诸如open、close、read、write等系统调用操作时,Linux内核将通过file_operations结构访问驱动程序提供的函数。
当然,现在网上已经有了这种摄象头的通用驱动,可以从相关网站下载usb-2.4.31.patch.gz,然后将这个补丁打到内核对应的位置即可。但是对有些内核版本的linux系统,在打补丁时,会产生 Config.in.rej和Makefile.rej。这时只需要将这两个文件中修改失败的部分手动添加到对应的Config.in和Makefile 中去就可以了。
3.1.3 linux内核配置
对于已经做过基本移植的linux在配置内核的时有以下几个方面是值得注意的:
1)因为要用到内核中的Video4Linux编程接口函数,所以在配置内核时首先必须选中Video for Linux并且最好是直接编译进内核而不用编译成模块的形式再加载;
2)要选中USB Support、OHCI、UHCI。并在USB Support下的USB Multimedia devices中选中对应的摄象头,对本系统来说,选择USB SPCA5XX Sunplus Vimicro Sonix Cameras,并把它配置成Module。
3)配置完内核后做make dep, make zImage, make module。则在对应的spca5xx目录下会生成spc5xx..o,可以把spc5xx..o通过NFS mount到目标板上或者加到主文件系统ramdisk中的某个目录下。然后在目标板上做 insmod spca5xx.o就会找到摄象头。
3.1.4 服务器端应用程序的编写
完成驱动程序和内核
Video4Linux 图象采集 网络编程 多线程同步 相关文章:
- 基于DSP的图象采集与处理系统的设计(06-15)
- 基于TMS320DM642的CCD图像采集系统设计(11-14)
- 嵌入式Linux网络编程之:网络基础编程(08-13)
- 嵌入式Linux网络编程之:实验内容——NTP协议实现(08-13)
- 嵌入式Linux网络编程之:TCP/IP协议概述(09-13)
- 嵌入式Linux网络编程之:本章小结与思考与练习(09-13)