基于单片机的倒车雷达的设计
时间:06-04
来源:互联网
点击:
2.2 超声波接收电路
超声波接收器包括超声波接收探头、信号放大电路及波形变换电路3部分,超声波接收电路的设计如图3所示。超声波探头必须采用与发射探头对应的型号,关键是频率要一致,否则将因无法产生共振而影响接收效果,甚至无法接收。由于经探头变换后的正弦波电信号非常弱,因此必须经放大电路放大。正弦波信号不能直接被单片机接收,必须进行波形变换。按照上面所讨论的原理,单片机需要的只是第一个回波的时刻。
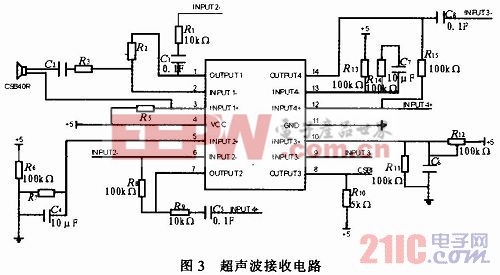
为减少负电源的使用,放大电路采用单电源供电,信号放大和变换采用了一片LM324通用运算放大器,前三级为放大器设计,后一级为比较器设计。合理调节电位器R12,选择比较基准电压,可使测量更加准确和稳定。
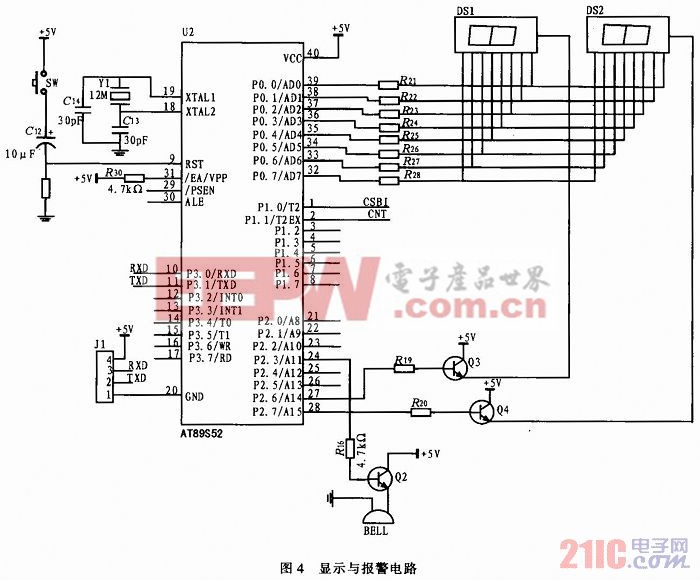
2.3 显示与报警电路
系统报警电路由一个三极管、一个蜂鸣器和一个电阻组成,其中R16的阻值为4.7 kΩ。当倒车雷达探测到的距离小于一定值时,触发蜂鸣器报警。控制蜂蜜器的晶体管接单片机的P2.3引脚,其引脚电平为高时报警。其电路图如图4所示。
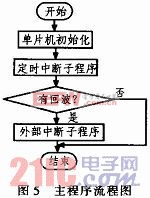
在系统硬件构架了超声波测距的基本功能之后,系统软件所实现的功能主要是针对系统功能的实现及数据的处理和应用。程序首先对系统环境初始化,设置定时器T0工作模式为16位的定时计数器模式,置位总中断允许位EA并给显示端P0和P2清0。然后调用超声波发生子程序送出一个超声波脉冲,为避免超声波从发射器直接传送到接收器引起的直接波触发,需延迟0.1 ms(这也就是测距器会有一个最小可测距离的原因)后,才打开外中断0接收返回的超声波信号。由于采用12 MHz的晶振,机器周期为1μs,当主程序检测到接收成功的标志位后,将计数器T0中的数(即超声波来回所用的时间)按下面公式计算即可测得被测物体与测距仪之间的距离,设计时取20℃时的声速为344.m/s则有:d=9
(CxTo)÷2=72xT0÷10000cm(其中T0为计数器T0的计数值)。测出距离后结果将以十进制BCD码的方式显示,然后再发射超声波脉冲重复测量。
由于倒车雷达的工作环境比较容易受外界的振动、冲击、电磁等干扰,必须在硬件和软件设计中考虑抗干扰的能力。本设计在电源的输入端串联了一个LC滤波器和扼流圈,防止干扰信号的串入;在硬件电路设计时增加了信号隔离、接地屏蔽;软件设计时对脉冲信号进行了滤波。
5 结论
文中设计的是基于AT89S52单片机的超声波倒车雷达,其结构简单、体积小、抗干扰性能好,可应用于汽车倒车等场合,提醒驾驶员倒车时有效地避开可能对倒车造成危害的障碍物和行人,从而有效避免由于倒车造成的汽车碰撞或擦伤经济损失和人身安全问题,具有较强的实用性。当然,要满足更高的精度要求,还须进行适当改进,例如可增加温度补偿单元;在某些特殊场合的应用中,还要考虑超声波的入射角、反射角以及超声波传播介质的密度、表面光滑度等因素。
- 基于FPGA的DSP设计方法(08-26)
- 电力电子装置控制系统的DSP设计方案(04-08)
- 基于DSP Builder的VGA接口设计(04-10)
- 基于DSP和USB的高速数据采集与处理系统设计(05-01)
- 数字信号处理(DSP)应用系统中的低功耗设计(05-02)
- 基于DSP的嵌入式显微图像处理系统的设计(06-28)