基于C8051F040单片机的承载平台平衡调整系统
引言
随着现代科技不断发展,人们对于各种基座平台水平精度的要求也越来越高,而现有的一些光学仪器已不能满足对一些工程、建筑、实验室和军舰基座平台进行水平度检测,针对这一现实问题,采用新华龙公司的C8051F040作为主控制器,设计出一个具有承重、倾角调节及液晶显示、语音播报等功能的高精度电子承载平台平衡调整系统。电子承载平台是一种承重、测量的设备,其工作原理是通过倾角传感器将作用在承载平台上的倾角大小转换为相应的电信号,以数字量的形式在液晶显示屏上显示出来,并且系统能实现自动调平。
系统采用C8051F040作为控制核心,利用高精密倾角传感器将倾角大小经液晶屏显示、语音播报输出,并能通过外部设定自动调整平台的水平和倾斜。如何选择承载平台的支撑腿,稳定速度和提高精度是系统设计的关键。系统选用直流电机驱动升降杆控制平台倾角,速度调整灵活,承载力大,精度高。系统具有的功能包括:可承载1000克重的物品,平台可沿任意方向在30°内倾斜,能在8秒内调平,调平精度<2°,且具有人机交互显示、语音播报等功能,是一个多功能的高精度平衡调整系统。
方案设计
根据设计要求,承载平台平衡调整系统可以划分为稳压电源,单片机(MPU),升降推杆,LCD显示模块,键盘控制模块和语音播报模块。系统模块基本框图如图1所示。
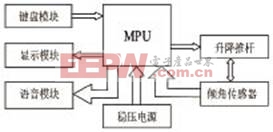
图1 承载平台平衡调整系统模块基本框图
升降推杆驱动方式的选择
升降推杆是一个重要的单元模块。系统是通过调整位于矩形平台三个边角升降推杆的位置,来实现平台平面倾角的变化,升降推杆驱动方式的好坏直接影响最终的结果,有如下两种可选驱动方案。
方案一:步进电机驱动螺旋推杆
用步进电机实现物体的精确定位和方向控制。步进电机是一种脉冲控制电机,它是一种能将脉冲信号转换为角位移的数模转换器,可广泛用于无需反馈控制但要求有精确位置的场合。该驱动方式是以步进电机旋转螺杆的方式来实现推杆的伸缩,达到改变平台各点位置的目的。步进电机可以实现准确步长,但输出力矩低,速度慢,体积大,较笨重。
在实际操作中,螺杆标准件的螺纹间距小,要达到8秒内迅速升降定位,需要电机转速达到10转/s,在实际测试中,步进电机的最大转速是3转/s,无法达到系统设计8秒内调整倾角的要求。
方案二:直流电机驱动升降推杆(见图2)
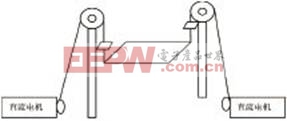
图2 直流电机驱动升降推杆结构简图
采用带旋转编码器控制直流电机,电机运转平稳,精度可以得到保证。但其驱动电路复杂,在短时间内难以实现。而直流减速电机具有转速快,体积较小,重量轻,可直接使用单片机输出PWM控制转速和可控性好的特点,经计算,选择减速电机以求较大力矩,即可满足系统在时间指标上的要求。
方案一可以达到高精度控制,但转速无法达到系统设计要求,方案二可达到系统速度和精度设计要求,且结构设计更为合理,故采用方案二。
电机驱动模块的选择
方案一:采用电机细分驱动。电机细分驱动芯片TA8435可以用两路PWM信号控制两个步进电机,能够较多地节省单片机资源,但致命的缺点是当单片机速度变化较大时,电机很容易失控。
方案二:采用专用芯片L298N。响应频率高,一片可控制两个直流电机,操作方便,稳定性好,外围电路简单,焊接容易。
因此,电机驱动模块采用方案二。
电源模块的选择
方案一:采用干电池作为系统的电源,由于系统耗电量较大,使用干电池需经常换电池,不符合节约型设计要求。系统所需采用机械部件多,系统平台倾斜角大,电池总量大,使用干电池存有较大安全隐患。
方案二:采用24V可充电蓄电池电源,不仅功率可以满足系统需求,不需要更换电池,而且比较轻便,使用更加安全可靠。
基于以上分析,电源模块采用方案二。
显示模块和键盘模块的选择
本设计显示模块使用液晶显示屏显示时间和路程。12864M汉字LCD液晶显示器的优点:微功耗、尺寸小、超薄轻巧、显示信息量大、字迹清晰、美观、视觉舒适;可以用中文LCD液晶进行菜单显示,使整个控制系统更加人性化。而键盘模块则选用4×4矩阵键盘。
倾角传感器的选择
本设计倾角传感器采用SFT245AL双轴倾角传感器。该传感器将物理信号转换为电信号,经放大电路放大并滤波后,通过A/D转换将模拟电压信号转换成数字量传送给MPU,校准处理后转化为倾角测试结果,测量范围±45°,它具有零点设定,输出频率可调和波特率可选等功能。
语音芯片的选择
该系统在语音播报上不需要长时间的语音播放,为了减小成本,本设计语音芯片选用ISD1420,其录音时间为20秒,价钱便宜,技术成熟。
最终方案
经过上述的分析和论证,
平衡 调整 系统 平台 承载 C8051F040 单片机 基于 相关文章:
- 基于DSP Builder的伪随机序列发生器设计及FPGA实现(04-18)
- 基于FPGA的Bayer彩色自动白平衡设计与实现(06-05)
- 十个中文例程教会你轻松上手制作Arduino智能小车(06-04)
- 技术控做的玩具就是酷,小车跷跷板平衡控制系统设计,完整解决方案(06-04)
- 13个基于STM32的经典项目设计实例,全套资料~(06-03)
- 助力机械手的应用及系统功能分析(12-19)