51单片机四驱无线遥控小车制作详解
小车参数:控制键5个:前进、后退、左转、右转、停止;有效距离200米;速度:
我想遥控小车大家都玩过,网上也有各种DIY小车的制作详解,我做的这个遥控小车和其他的作品大同小异,但作为单片机设计,这次设计我主要强调单片机控制,就是说,这个小车是由单片机控制的,这次我把单片机按键发送程序、无线模块使用、电机驱动作为本教程的核心内容。
一 硬件组装
1 小车运动部分
此图是我师弟组装好的,请大家作为参考
所需工件:直流电机4个,L293D电机驱动模块,蓄电池一块,车身底盘
说明:车身底盘大家根据自己的购买力自行购买,蓄电池也是,至于L293D模块,淘宝上卖的比较贵,不过我用的就是成品模块,效果非常好,钱不多的同学可以自己买芯片,自制模块,原理很简单,官方资料是很详细的;或者改为继电器控制都可以,具体看自己的实际购买力。用模块的好处是,模块可以输出5V电源给系统供电,详细请参考淘宝网。
如果你买的是现成的底盘,那就和我的一样了,组装实在是没啥可说的,把电机固定上去就是,不行?别开玩笑了,小学生都会的!至于想自己做底盘的,我想说,要搞结实点,咱这次的小车马力是很足的,因为有电机驱动,速度比较快(不带减速齿轮的底盘一定要小心,速度非常的快),后劲也足,不小心撞墙很正常,所以不好的底盘就得小心了!
组装好后,就是电机和驱动模块的接线了,下面我就详细的说一下L293D模块的使用:
L293D是专门的电机驱动芯片,工作电压5V,驱动电压输入可达36V,输出电流正负600ma,4个控制端,4个输出端,原理如
图:
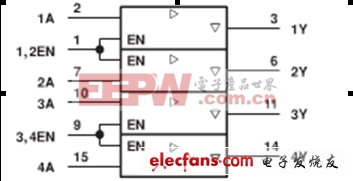
其中A为输出控制端,Y为输出控制端,1A即控制1Y,以此类推。1,2EN 3,4EN需要短接,芯片最大工作电压不得超过7V。
封装图:
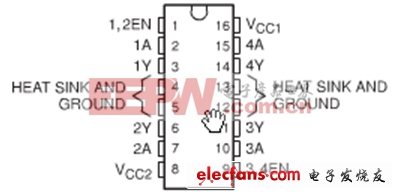
Vcc1接工作电压,5V,Vcc2接电机的驱动电源,一般来说,这个电压要比5V高,我用的是12V蓄电池,就把12v的正极接到VCC2,要记住的是,芯片、单片机、蓄电池电源是需要共地的,不要觉得你电机是12V,单片机控制部分是5V就把电源完全独立开来,正极是完全独立的没错,但是GND(负极)都必须是接在一起的。
驱动芯片与电机的接法:
例:左边前后轮:
1Y接电机红线,2Y接电机黑线,左边前轮电机
3Y接电机红线,4Y接电机黑线,左边后轮电机
前进指令:1A=1(输出12V),2A=0(输出0V),3A=1(输出12V),4A=0(输出0V)
后退指令:1A=0(输出12V),2A=1(输出0V),3A=0(输出12V),4A=1(输出0V)
右边的和左边的接法是完全一样的
注意:前进和后退并不是绝对的,因为是直流电机,不刻意的强调正负极,就看你电机是怎么接线的,结果完全可以与我的相反。不过一定要保证电机接线的统一性,不能随意,不能说前轮接的是顺时针线序,后轮是逆时针线序,如果买的电机连接线不带颜色,一定要自己测好了那种接法是顺时针的,哪种是逆时针,否则前轮前进后轮后退,很摧残电机的,或者左右边的2对电机转动方向不统一,导致编程麻烦。
芯片默认输出0V ,所以在没有程序的时候,大家不需要担心电机会转动。一个芯片只能控制2个电机,右边的再接个芯片就可以了,网上卖的模块都是2个驱动芯片的,刚刚好够4个电机。买模块的好处就是拿来可以直接接线,而且模块上有标号,不必担心接错,希望初学者还是买模块,贵是贵了,但是速度有保证的!驱动模块如图:

接好之后,我就说下小车的转动方式:前进后退就是4个电机同时的正转、反转;左转弯和有转弯有2种方式:A一边转动一边不转,B一边正向转动一边反向转动,这两种各有个的好处,各位可以根据自己的实际情况来确定转弯的方式,不同车的底盘效果肯定是不一样的,转弯的方式是程序控制的,本程序是B种方式。
我的小车图:

这种电机是减速的,所以不会很快,如果是直接电机带动的轮子,再用12V电源的话,那速度就非常快了,模块的输出直接连接电机电源线,输出根据标号或根据程序接入到单片机上
单片机的接线:
如图:

这是我的最小系统板,全部引出IO,带板载USB下载功能,P0口输出接了8路流水灯(有选通开关),这样设计板子是为了P0口做输出时专门看输出状态的。板子是我们工作室自己设计的,我们所有的作品调试都是建立在它的基础上,网上也有的卖这种USB下载板,40元左右吧!
我这个人比较懒,用的是电机驱动模块,L293D的输入是有标号的,1——8直接按照顺序接到P1.0——P1.7就可以了,说到这里,我不得不说一下,单片机的接线是非常自由的,因为是程序控制,无法就是改改端口而已,我只根据我的程序来说明接线,有基础的可以自己设计!
驱动芯
- 串口线制作方法(12-15)
- 光立方的制作经验杂谈(12-01)
- 热转印法制作PCB个人经验谈(11-30)
- 嵌入式根文件制作方法(11-26)
- 嵌入式linux内核制作方法(11-26)
- 51单片机最小系统制作笔记(11-25)