基于神经网络的自主吸尘机器人混合视觉研究
)转指令;仅检测到前方障碍物及同时检测到左侧和右侧障碍物则输出应急停顿指令;无障碍物信号输出前进指令。另外碰撞传感器检测到碰撞信号也输出停顿指令,处理器收到停顿指令后采取相应的策略。
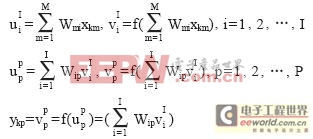
每个输出值是0和1之间的某个实数,对应于预测相应运动行为的置信度。可以根据置信度对输出进行简单处理,即当输出超过0.5时,则认为输出为1,否则认为输出为0。下面给出BP神经网络的算法推导。
设输入层为M,隐层为I,输出层为P,对应的小写字母表示任一信息单元。输入层与隐层的突触权值用Wmi表示,隐层与输出层的突触权值用Wip表示。
神经元的输入用u表示,激励输出用v表示,u、v的上标表示层,下标表示层中的某个神经元。对应于任一训练样本Xk=[xk1,xk2,…,xkm]T的实际输出为Yk=[yk1,yk2,…,ykp]T,期望输出dk=[dk1,dk2,…,dkp]T。设n为迭代次数,网络输入训练Xk,由工作信号的正向传播过程可得:
输出层的第p个神经元的误差信号为:
ekp(n)=dkp(n)-ykp(n)
定义神经元P的误差能量为 ,
,
则输出层所有神经元的误差能量总和 。
。
在误差信号反向传递过程中,逐层修改连接权值。
下面计算误差信号的反向传播过程。
(1)隐层I与输出层P之间的权值修正量。
根据梯度下降和Delta法则,Wip(n)的修正量为:

其中,h是学习步长,![]() 为局部梯度。
为局部梯度。

当激励函数为Sigmoid函数,即
 ,
,
得

则下一次迭代时隐层J上任一节点与输出层P上任一节点之间的权值为:
Wip(n+1)=Wip(n)+"Wip(n)
(2)隐层I上的任一节点与输入层M上的任一节点的权值修正量。
与(1)中的推导类似,

其中:
则在下一次迭代时隐层I上任一节点与输入层M上任一节点之间的权值为:
BP算法框图
图4给出了BP神经网络算法的程序流程图。在执行算法之前,首先要设置变量和参量。其中:Wmi(n)为第n次迭代时输入层与隐层I之间的权值向量;Wip(n)为第n次迭代时输出层与隐层I之间的权值向量;n为迭代次数,K为训练样本的下标,Maxloop为最大迭代次数,Maxtrain为训练样本的总数,ξ为能量最小误差。

仿真结果
用FoxPro建立输入样本的数据库,用VC编程训练网络。训练时用了72组输入样本,并且循环4000次训练网络,训练时间15s。表1给出了部分训练样本的示例(P0表示样本0,以下同)。
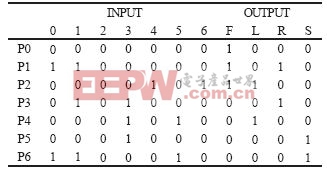
表1 训练样本示例
初始权值为-0.01~0.01的随机数值。下面给出了网络训练的权值输出。
输入层与隐层权值
0.251,-9.187,2.347
0.231,-9.225,2.373
0.266,-9.213,2.331
4.722,-1.479,-1.470
0.214,2.520,-9.067
0.293,2.512,-9.013
0.275,2.442,-8.890
输出层与隐层权值
-11.843,-5.154,-4.722,6.348
9.970,10.696,-10.990,-11.535
9.938,-9.617,10.613,-12.470
为了验证训练权值的正确性与强壮性,对大量的输入样本(包括没有经历训练过程的样本)进行实验,网络产生相匹配的输出。实验结果表明,网络的训练是成功的。
部分实验数据如下:
输入数据组数:6
第0组输入数据:0000000
第0组输出为:1000
第1组输入数据:0001000
第1组输出为:0001
第2组输入数据:1101000
第2组输出为:0010
第3组输入数据:1110000
第3组输出为:1010
第4组输入数据:0001100
第4组输出为:0100
第5组输入数据:1101001
第5组输出为:0001
最后利用Matlab提供的Neural Network工具箱,对训练网络的输出和相应的期望输出进行衰退分析,以测定训练网络的性能。图5为前面训练所用的72组输入数据产生的输出A和期望输出T的衰退分析图。其中虚线为最佳线性拟合曲线A=T,实线为72组输出A与相应的期望输出T的线性拟合。由图5可以看出,拟合效果理想,因此训练网络的性能可靠。
实际应用过程的思路为:将BP网络训练的权值移植到机器人的处理器中;7组传感器按顺序轮流工作,每循环一次得到一组输入作为神经网络的输入;通过神经网络计算得到匹配的实时输出;行走电机根据输出信号作出相应的避障行为。
本文将超声波传感器和红外传感器融合进自主吸尘机器人的视觉系统,从而获得相对于单一传感器更加准确和全面的障碍物信息。采用了基于神经网络的多传感器信息融合算法,通过网络训练,机器人能够对训练过程中没有经历的实际情况做出合理的反应。这种算法的鲁棒性和容错性很强,能够适应自主吸尘机器人非结构化的工作环境。
- 应用超声波传感器设计水位自动控制系统研究(12-02)
- 单片机超声波传感器测量距离(11-18)
- 公路划线机划线导向机器人的设计(12-07)
- 只要有车长+1.5m的空间,即可自动平行停车(08-09)
- 基于红外对射技术的安全警示系统设计(10-29)
- 基于单片机的仰卧起坐计数器(10-29)