基于单片机的仰卧起坐计数器
摘要:仰卧起坐作为一种体能训练的方法,再加上它不受场地环境影响的优点,成为非常适合社会大众的简易运动方式。本设计将计算机软、硬件技术溶为一体,以51单片机作为控制核心,达到对仰卧起坐的自动计数。具体过程包括开始、结束控制,计数值的实时显示,测试结束的提示等。该设计具有结构简单、功能齐全、实用性强,可靠性高等特点。
随着社会的发展,人们对健康越来越重视,积极地参加各种体育运动,仰卧起坐作为一种体能训练的方法,由于它具有不受场地环境影响的优点,成为非常适合社会大众的简易运动方式。仰卧起坐的好处是会锻炼你的腹肌,让你能更好地控制自己的身体体重,塑造完美的身材曲线。
除了参加体育运动外,人们还利用电子产品帮助自己量化每天的锻炼成果。本设计将计算机软、硬件技术溶为一体,以AT89S51单片机为核心,以红外传感器来实现对人体位置的检测,达到对仰卧起坐的自动计数。具体过程包括开始、结束控制,计数值的实时显示,测试结束的提示等。该设计实用可行,具有结构简单,实时性强,可靠性高等特点。
1 系统总体方案
系统是光电传感器、C语言、数码显示管和声光提示系统的综合应用,具体方案如框图1。
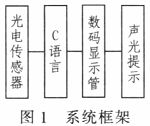
其中,光电传感器:检测人运动时的两种状态,躺姿和坐姿。
C语言:累加计数值。
数码管:即时的显示仰卧体坐的个数。
声光提示:每到一分钟自动提示。
2 系统的硬件设计
系统的硬件系统包括如下几个部分:光电传感器、功能控制、数码显示、声光提示和计算机控制。
2.1 光电传感器
光电开关的工作原理是根据投光器发出的光束,被测物体阻断光束,有部分光束发生反射,受光器则根据不同的情况做出判断和反映。常用的光电开关有:漫反射式光电开关、镜反射式光电开关、对射式光电开关、槽式光电开关、以及光纤式光电开关。本设计采用的是漫反射光电开关。
漫反射光电开关器原理如图2所示,它发射光束的同时也接收反射回来的光束,当光束发射出来后遇到阻挡物,则光束经过漫反射被接收器吸收,于是就产生了开关信号。

2.2 功能控制模块
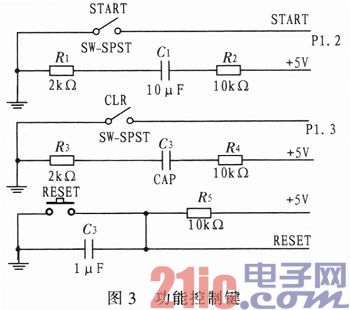
功能控制涉及3个方面:开始、提示复位、以及系统复位,分别如图3所示。开始键按下后计数器开始工作,提示复位键按下后重新开始计时,每60 s算一次计数时间,系统复位键按下后,停止工作,计数器清零。
2.3 数码管显示模块
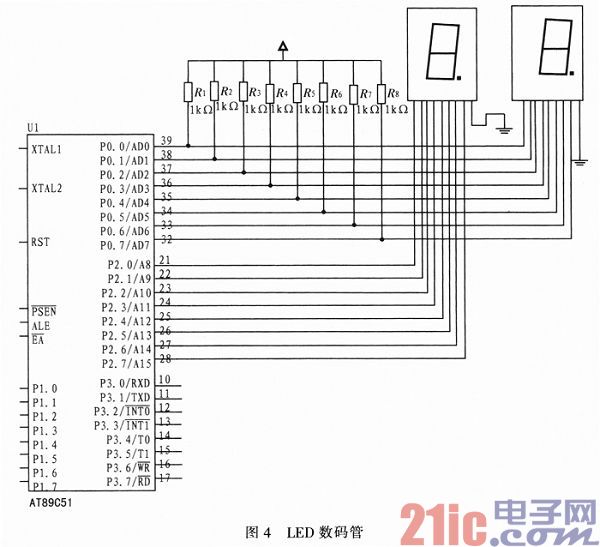
LED数码管由发光二极管封装在一起组成“8”字形的器件,引线在内部连接完成。LED具有灵活、高效、低耗的特点。LED数码管可均匀排布形成大面积的显示区域,比如可以用于图案或者文字的显示,或者可以播放视频文件。显示模块如图4所示。
2.4 声光提示模块
在声光提示系统中,采用灯光闪烁和蜂鸣提示的方法告知被测试者1分钟时间到了。其中灯光闪烁靠发光二极管实现,而蜂鸣提示靠Speaker实现,具体的电路图如图5所示。

2.5 控制模块
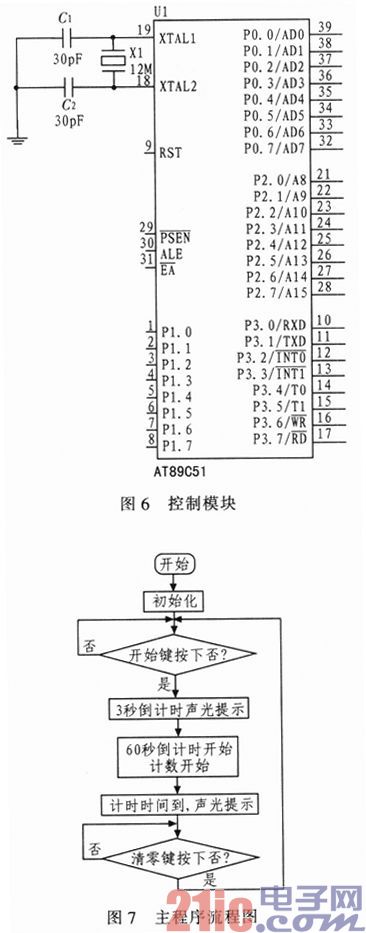
模块控制系统主要由AT89C51负责,AT89C51是AMETL公司生产的,它是一种高性能的8位微处理器,带有高密度、可编程、可擦除的功能,与MCS-51指令相互兼容。AT89C51提供以下功能标准:4K的闪存,128字节的内部存储器,输入输出端口32个,16位定时器和计数器2个,全双工串行输入数据口1个,片内振荡器,时钟电路。?AT89C51的引脚XTAL1是反向放大器的输入引脚,XTAL2是反向放大器的输出引脚。该反向放大器需要配置振荡器,如石晶振荡或者陶瓷振荡。控制模块电路图如图6所示。
3 系统的软件设计
系统软件采用keil uvision2进行编写,Keil C51软件能够提供丰富的库函数,并具有功能强大的集成开发调试能力,全Windows窗口界面,可以使用户能在很短的时间内就
能学会使用keil C51来开发单片机应用程序。
Uvision2集成开发环境具有一个项目管理器,和一个有错误提示的功能丰富的编辑器,以及具有设置选项、生成工具,在线帮助等功能。利用uvision2可以创建源代码并看可以将这些代码放进目标项目之中进行测试。Uvision2具有自动编译、汇编的能力,并为开发者提供一个简便的操作界面。主程序流程图如图7所示。
部分程序如下:
4 系统仿真
Protues软件是EDA的一种工具软件,它不仅具有一般的仿真功能,还能仿真单片机以及外围的一些元器件,它是目前公认为较好的单片机仿真工具。
Proteus可以绘制SCH原理图、进行程序元代码的调试,仿真单片机及外围的元器件,印刷电路板的设计,真正地实现了从SCH原理图到产品问世的完整开发。Proteus是一款将电子线路仿真软件、印刷电路板设计软件以及模型交互仿真软件三者结合在一起的非常有用的软件平台,其处理器支持的模型有8051、ARM
- FPGA的DSP性能揭秘(06-16)
- 基于单片机通用引脚的软件UART设计(10-16)
- 分时操作系统思想在单片机中的具体应用 (10-30)
- 基于AT89C51+DSP的双CPU伺服运动控制器的研究(05-26)
- 关于RTX51 TINY的分析与探讨(05-30)
- 基于MC9S12DGl28单片机的智能寻迹车设计(04-03)