基于单片机的线阵CCD驱动及采集系统的设计
摘要:文章介绍一种新型的基于单片机的线阵CCD驱动电路的设计。系统通过C8051F020型单片机作为下位机,完成CCD驱动、信号采集以及与计算机(上位机)通讯等工作。这种方案切实有效地解决了CCD驱动脉冲复杂、频率要求较高,普通单片机难以实现的问题。大量反复的实验表明,此设计具有很高的可移植性、可操作性,并己应用于一些光学实验之中,效果良好,稳定方便。
关键词:单片机;C8051F020;线阵CCD;Labview
0 引言
在如今的科研和工程上,CCD的应用越来越广泛,但是其驱动脉冲和信号的采集的要求较高,一般需要CPLD或者DSP等比较复杂的微控制器来承担主要控制任务。这些方案较单片机而言,操作难度大,起点高,而且成本相对较高,然而单片机因为种种限制,很少有合适的驱动和采集方案,一些己发表的论文中,虽然提出了概念,但是经测试,很难实施,所以本文提出了一种新型的利用单片机驱动CCD的方案,此方案基于C8051F020单片机,能够对CCD进行良好、高速的驱动,同时进行采集,并通过RS232接口与电脑通讯,在电脑上重组数据,完成对光信号的分析等功能。经实验,本方案效果良好,同时,本方案采用Labview进行人机交互界面的设计,灵活性高,能够根据需要,将CCD改变成位置传感器等其他用途。
1 CCD简介
1.1 CCD基本原理
CCD(电荷耦合元件)是一种半导体器件,由许多排列整齐的电容组成,能感应光线,并将影像转变成数字信号。经由外部电路的控制,每个小电容能将其所带的电荷转给它相邻的电容,最终通过脉冲的控制,逐个测量每个电容的电荷量,得到光强值。
1.2 TCD1206型线阵CCD引脚及主要参数
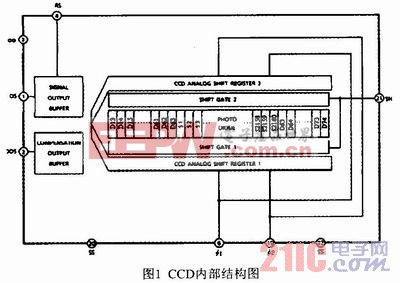
本设计采用的是TCD1200D型线阵CCD传感器。TCD1200D是一种高灵敏度、低暗电流、2160像元的线阵CCD图像传感器。该传感器可用于传真、图像扫描和OCR。该器件的内部信号预处理电路包含采样保持和输出预放大电路。它包含一列2160像元的光敏二极管,当扫描一张B4的图纸时,可达到8线/毫米(200DPI)的精度。其引脚及原理如图1所示。
TCD1200D线阵CCD传感器特性:
·像敏单元数目:2160像元
·像敏单元大小:14×14×14 μ m(相邻像元中心距为14 μ m)
·光敏区域:采用高灵敏度PN结作为光敏单元
·时钟:二相(5V)
·内部电路:包含采样保持电路,输出预放大电路
·封装形式:22脚DIP封装。
1.3 TCD1200型线阵CCD驱动采集脉冲要求
该型号的CCD驱动需要发送SH、φ1、φ2、RS等脉冲,而采集需要差分OS和DOS两路信号,具体脉冲要求如图2所示。

其中SH为积分脉冲,高电平的时候,CCD像元开始累积电荷,低电平的时候停止积累;φ1、φ2为两路反相的驱动脉冲,其主要作用是控制电荷的转移;RS为信号触发脉冲,每个下跳沿会触发一个像元释放电荷,从而将电信号输出;OS则是输出信号,在经过13个哑元输出和光屏蔽输出后,输出有用信号;DOS则是参考电平信号,与OS差分之后,得到最终的信号输出。这些脉冲的要求频率高(例如RS典型频率参考值是1 MHz),相互之间匹配要求高,因而一般单片机的操作难以完成。
2 硬件电路设计
如图2所示,CCD的驱动需要发送包括SH、φ1、φ2、RS等4个驱动脉冲,其中RS的频率范围是0.02MHz到2MHz,典型值是1MHz。这种高频率的脉冲,对单片机来说,难以独立完成,所以本系统选用了一定的数字电路进行辅助设计。同时由于C8051F020单片机的A/D转换最高值为500kHz,而CCD发送模拟信号的频率(即OS的频率)与RS相同,所以RS的频率亦选为500kHz。
具体方案是用单片机自带的PCA模块发送稳定的1MHz的方波脉冲,然后通过D触发器(74HC74芯片)进行2次分频,获得5V、0.5MHz和0.25M Hz的方波脉冲(两种频率都各有两路电平总是相反的脉冲),其中0.5MHz脉冲作为RS驱动脉冲,0.25MHz的两路脉冲分别作为φ1和φ2的脉冲。同时用定时器2检测RS,进行计数,确定SH的积分时间,发送符合要求的SH脉冲,同时SH的脉冲需要一个反相器,进行电平转换(3V~5V),和发送D触发器的控制脉冲。对于DOS的采集,本系统选用的是用OP27搭建的减法器和跟随器进行采集。
CCD的脉冲控制和信号A/D转换工作主要由C8051F020单片机完成。如前所述,TX0和RX0配置在P0.O和P0.1,进行RS232通讯;由P0.2口(PCA)发送1 MHz的稳定方波脉冲;P0.3(T2)进行RS (0.5 M Hz)的计数;A/D转换触发控制位(CNVSTR)连入引脚P0.4;P0.5通过定时器2控制,发送SH脉冲;P1.1为模拟输入口,接收模拟信号。
3 人机交互界面软件设计
本系统的软件设计包括C8051微控制器的应用程序和人机交互界面的Labview应用程序。
- Linux嵌入式系统开发平台选型探讨(11-09)
- VxWorks实时操作系统下MPC8260ATM驱动的实现(11-11)
- VXWORKS内核分析(11-11)
- Linux内核解读入门(11-09)
- linux文件系统基础(02-09)
- 基于Winodws CE的嵌入式网络监控系统的设计与实现(03-05)