基于CAN总线的机场目视着陆灯光引导设备
机场目视着陆灯光引导设备是用于进近灯光系统的闪光设备。通过控制闪光灯闪光,作为目视设施,显示机场跑道中心延长线。高亮度灯光作有规律的闪光,从跑道未端远处的进近航道上迅速移向跑道端口,能在较差能见度条件下和跑道进近地区中有较多杂乱灯光干扰时,给飞行员一个非常显著的动态提示,从而引导飞机找到机场中线,顺利进场着陆。
机场目视着陆灯光引导设备除了对可靠性和稳定性要求相当严格外,还要求设备能够对异常情况和故障进行迅速查找、排除,并能在闪光灯主控制室实时反映每一个闪光灯的状态。
设备组成
机场目视着陆灯光引导设备由主机控制器、分灯箱控制器、灯具、电源线、信号线等组成。
主机控制器接受操作人员发出的指令,对设备进行实时控制;根据指令对每个分灯箱控制器进行实时通信,发出各种亮度信号、闪光速度信号,并接收该分灯箱控制器的返回信号,同时在主机控制器面板上同步显示该灯具亮灭状态,且对异常状态进行报警。
分灯箱控制器即时接受主机控制器的指令,控制灯具的电源高低和开关时间,从而实现闪光灯的亮度调节、速度调节,并检测灯具状态是否正常,且将该状态返回给主机控制器。
灯具实现电光转换,支撑灯体,调节光轴方向。
系统先进性
传统的机场目视着陆灯光引导设备采用模拟信号传输控制,由主机控制室发出一串脉冲信号,各个闪光灯节点通过对脉冲信号的解析,执行不同的灯光指示,并通过单独的一条反馈线给主控制器发出应答脉冲信号。
采用这种控制方式,在实践中发现有两个弊端。首先,主控制室发送的秒脉冲信号如果因受到干扰而造成闪光灯未能正常接收,它将继续下一次的发送,而不能处理本次的异常状况;其次,由于反馈线受到电源线的干扰,使主控制器无法正确判断闪光灯的准确情况,如果将反馈线架空,又将防雷击问题引入到系统中。
1.先进的通信方式
在我们的改造方案中,由于传统的485通信有以下的缺点,故不予采用。
1:抗干扰能力差,误码率高,无纠错重发机制。
2:一个节点出错,有可能导致网络瘫痪。
3:只能采用查询方式。
4:通信距离短,不方便以后的功能扩展。
2.高性能的主控制器
主控制器采用高可靠性的PHILIPSP87C52,该单片机计算速度快,抗干扰能力强,温度范围宽。另外,该单片机程序容量大,软件升级容易,可构成高功能、大容量、抗干扰能力极强的工业控制系统,为现场安全可靠运行奠定基础。分灯箱控制部分亦采用P87C52作为主控CPU,配用CAN控制器和收发器,完成对主机命令的接收和执行以及回送指令执行结果和本机状态信息。
3.可靠的软硬件设计
系统使用的所有芯片全部采用军品级,满足恶劣环境下的正常工作。软、硬件采用冗余技术,确保系统的正常工作,如:软硬件看门狗,输入输出隔离等技术,软件自检和软件纠错等技术。硬件设计按照工业EMC设计,系统对外部设备(如飞机的仪器仪表)的干扰,也符合工业设计标准。
4.机箱
机箱采用密封防尘设计,防磁防电,保证强弱电分离,从而使系统具有极高的抗干扰消灭和无故障工作时间。由于分灯箱安装在野外,因此线路板上采用防水、防潮、防霉、防酸等处理措施。
系统原理
主机部分
主机部分由主机控制子系统、键盘子系统和LED反馈指示子系统组成。组成框图及大致功能如下图所示: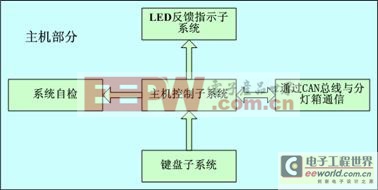
主机控制子系统主要实现处理键盘指令、向LED反馈指示子系统发送数据、与各分灯箱通信和系统自检四大功能。当按键动作有效时,按键信号通过74HC373进行锁存,主机CPU读此地址内容即判断出何键被按下,并进行相应操作;当数据送LED显示时,主机CPU向二片CD4067送6位数据,其中4位作为地址线共用A、B、C、D,一根使能线送U1(CD4067),另一根使能线送U2(CD4067),从而级连二片CD4067。当接收到操作员通过按键发出的指令,经主机CPU处理后,通过CAN总线向各分灯箱发送数据包,并等待分灯箱发送的执行情况的数据包;当选择自检功能时,由主机CPU逐次向各分灯箱发远程帧,通过各分灯箱是否响应来判断它们是否正常。
键盘子系统主要实现通过不同的按键,向主机控制子系统发出不同的指令。触摸按键一端接地,一端接主机控制板上的74HC373,为保证可靠工作,在74HC373端接10K的上拉电阻,初步定为6个按键,强、中、弱、速度、复位、自检。
LED反馈指示子系统主要实现同步显示各个分灯箱的工作状态以及自检时显示故障位置,LED经开关管8050与键盘上的CD4067相连。
分灯箱部分
分灯箱部分由分灯箱控制子系统和工作板子系统组成,组成框图及大致功能如下图所示: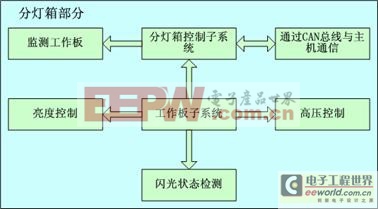
- 对TTCAN的分析(05-26)
- 嵌入式Win CE中CAN总线控制器的驱动设计与实现(05-01)
- μC/OS-II的多任务信息流与CAN总线驱动(07-11)
- 采用CAN总线实现DSP芯片程序的受控加载(11-08)
- 基于DSP的电动汽车CAN总线通讯技术设计(10-08)
- 基于DSP的CANopen通讯协议的实现(01-18)