基于S3C2440的Ethercat实时工业以太网
1 引言
工业以太网由于低成本、易于组网和具有相当高的数据传输速率、资源共享能力强以及易于Internet连接等特点[1],使其在工业中应用越来越多。Ethercat技术是德国BECKHOFF公司提出的实时工业以太网技术,它基于标准的以太网技术,具备灵活的网络拓扑结构。系统配置简单,具有高速、有效数据率高等特点,全双工特性完全得以利用[2]。
2 Ethercat技术介绍
2.1 Ethercat的系统组成及运行原理
Ethercat采用了主从介质访问方式,在基于Ethercat的通信系统中,主站控制从站发送或接收数据。主站发送数据帧,从站在数据帧经过从站时读取相应报文中的输出数据。同时,从站的输入数据插入到同一数据帧的相关报文中。当该数据帧经过所有从站并与从站进行数据交换后,由Ethecat系统中末端从站将数据帧返回[3]。图1由一个主站和3个从站组成的线性拓扑结构的简单Ethercat系统。
2.2 Ethercat协议
Ethercat以标准以太网技术为基础,在MAC(媒体访问层)增加了一个确定性调度的软件层,该软件层实现了通信周期内的数据帧的传输。Ethercat采用标准的IEEE802-3以太网帧,帧结构如图2。Ethercat在标准以太网帧结构中使用了一个特殊的以太网帧类型0x88A4,采用这种方式可以使控制数据直接写入以太网帧内,并且可以与遵守其它协议的以太网帧在同一网络中并行。一个Ethercat帧中可以包含若干个Ethercat子报文,每个报文都服务于一块逻辑过程映像区的特定内存区域,由FMMU(Fieldbus Memory Management Unit)寄存器和SM (SyncManager)寄存器定义,该区域最大可达4GB字节。Ethercat报文由一个16位的WKC(Working Count)结束,其数据区最大长度可达1486个字节。在报文头中由8位命令区数据决定主站对从站的寻址方式,由于数据链独立于物理顺序,因此可以对Ethercat从站进行任意的编址[4]。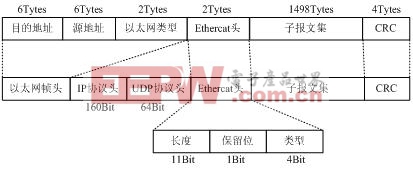
图2 Ethercat帧结构
2.3 Ethercat性能
Ethercat整个协议处理过程都在硬件中进行。EtherCAT在网络性能上达到了一个新的高度。1000个分布式I/O数据的刷新周期仅为30μs,其中包括端子循环时间。通过一个以太网帧,可以交换高达1486字节的过程数据,几乎相当于12000个数字量I/O。而这一数据量的传输仅用300μs。100个伺服轴的通讯只需100μs[5]。在此期间,可以向所有轴提供设置值和控制数据,并报告它们的实际位置和状态。分布式时钟技术保证了这些轴之间的同步时间偏差小于1μs [6]。
3 基于ARM的从站节点控制器的硬件设计
Ethercat从站节点的协议部分可以直接利用BECKHOFF公司的从站控制器ESC。ESC从站控制器提供3种接口规范如表1,具体采用哪一种方式可以设置控制器的EEPROM来选择。
表1 接口规范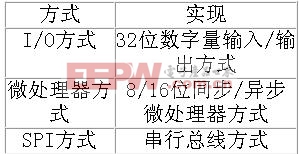
本文设计的Ethercat从站节点硬件包括从站协议控制器、从站CPU和网络接口等部分组成。Ethercat从站中最关键部分是Ethercat协议控制器,它实现Ethercat的物理层与数据链路层的协议。现在市场上有多种Ethercat协议控制器可供使用,如FPGA实现和ASIC实现。从站CPU采用ARM920T核的S3C2440芯片。接口连接方式采用16位异步微处理器方式[7]。从站的硬件实现如图3所示。
其中ARM控制器实现Ethercat对现场任务的收集与调度;Ethercat从站控制器实现Ethercat协议;EEPROM用于保存从站配置数据和从站描述数据;网络接口用于主从站之间或从站与从站之间的连接,根据Ethercat从站控制器的不同网络接口可以分别为2-4个,网络接口采用标准以太网物理层器件就可以。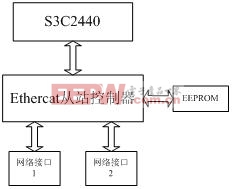
图3 从站节点结构框图
4 数据交换
主从站之间交换的数据主要分两种形式:一种是周期性数据;另一种是非周期性数据。周期性数据传输可以根据任务的紧迫性划分其优先级,通过采用EDF算法调度任务,把划分好优先级的任务放入缓冲区供系统调用。缓冲区为在内存中分配的一段空间,两端都可以访问缓冲区中的数据;非周期性数据采用邮箱方式传输,此时一端写入数据到内存,且只有此段内存写满后另一端才能开始从内存中读取数据,并且只能当内存中的数据全部读出时,才能重新写入数据。针对这两种数据通信方式,从站程序可以对非周期性数据通信采用查询方式,对周期性通信采用中断方式,程序流程图如图4、图5所示[8]。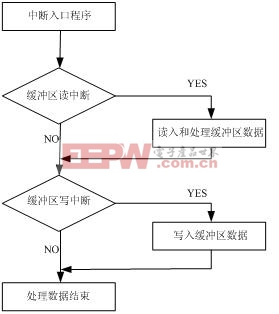
图4 中断方式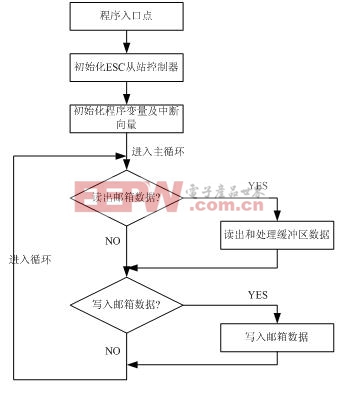
图5 查询方式
5 最小截止优先(EDF,Earliest Deadline First)算法
系统对周期性任务采用最小优先级优先算法进行调度,调度算法在ARM微控制器中实现。处理器对紧迫性事件的处理能力决定了系统处理突发事件的能力,把系统各种需要调度的任务按照紧迫程度用优先级来划分,通过采用最小截止期优先算法来动态优先处理突发事件,很好地提高了Ethercat网络实时性能。
EDF(Earliest Deadline First)是一种动态可抢占优先级实时调度,所有实时任务必须满足以下限制条件:
(1)所有实时任务均为周期任务,且周期大于或等于截止期。
(2)所有实时任务必须在其截止期到来前结束。
(3)所有实时任务相互独立。
(4)所有实时任务具有恒定的运动时间。
任务按周期由大到小排列为 EDF以任务的截止期与当前时刻的距离确定任务优先级(称这一距离为时限距离),距离越近,优先级越高,因此,EDF总是选择当前最迫切需要完成的任务获得处理器。Liu和Layland证明如下:
EDF以任务的截止期与当前时刻的距离确定任务优先级(称这一距离为时限距离),距离越近,优先级越高,因此,EDF总是选择当前最迫切需要完成的任务获得处理器。Liu和Layland证明如下:
对于由n个周期任务组成实时任务集,当且仅当:
- 嵌入式Web服务器移植与测试(03-03)
- 基于S3C2440的嵌入式IPv6防火墙设计(09-02)
- 基于OpenWrt的移动机器人系统设计(01-17)
- 基于S3C2440处理器Linux平台的物流配送系统设计(02-05)
- 基于嵌入式的杯突试验机测控系统设计与实现(02-12)
- 基于ARM的多路同步的A/D和D/A设计(06-29)