基于CAN总线的步进电机多机控制系统的设计
时间:08-10
来源:互联网
点击:

图4 usb-can模块流程
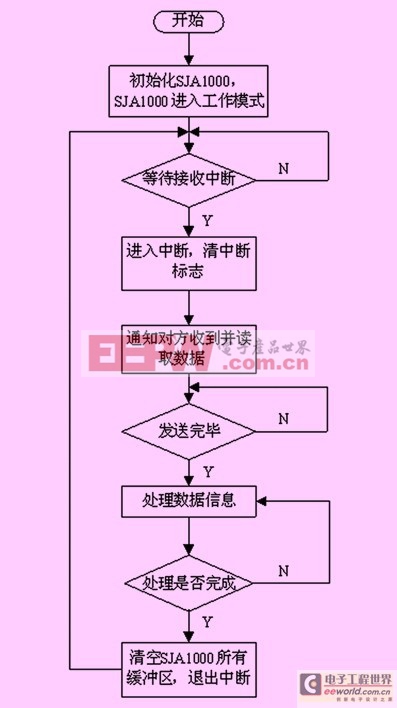
图5 can节点模块流程
5 结束语
can现场总线具有通信距离远、传输速度快的特点,该系统可实现对电机的全集成数字控制。基于步进电机行程的可控性,本系统可实现对运动对象的精确位置控制。此外,可以在can节点模块上多加几路限位等机械急停按钮,使电机更加安全、可靠的运行。
- 对TTCAN的分析(05-26)
- 嵌入式Win CE中CAN总线控制器的驱动设计与实现(05-01)
- μC/OS-II的多任务信息流与CAN总线驱动(07-11)
- 采用CAN总线实现DSP芯片程序的受控加载(11-08)
- 基于DSP的电动汽车CAN总线通讯技术设计(10-08)
- 基于DSP的CANopen通讯协议的实现(01-18)