基于超声传感器的自动报靶系统设计与实现
0 引言
为了更好、更高效地训练枪械持有者的射击技能,解决传统训练设备技术落后、效率低等问题,更好地适应高效、通用、科学的训练形势,发展与之相适应的新的现代化训练设备迫在眉睫。现有大多数自动报靶定位装置的靶标皆为有形靶标。多数采用封闭式声空腔结构,采用前后封闭靶板,对前后封闭靶板受弹数有一定的技术要求,1cm2多者8发、少者4发前后靶板就要修补。因而靶标的使用寿命低,更换修补次数多。另外,现有技术中的定位方法是利用弹丸的弹头波到达靶面上的不同传感器所产生的时间差,确定弹丸在靶面上的坐标。虽能较好解决弹丸精确定位,但是不能解决连发问题。因此,现有的声电定位装置存在以上缺陷,而且适用范围也有一定的局限性。针对现有技术的上述不足,提出一种敞开形超声传感器的报靶系统,其结构简单、体积小、重量轻、无耗材并且野外布设、便携、射击瞄准指示物材料无特定要求,定位精度高,能解决弹丸单、连发精确定位问题。是一种能很好适用于野外实弹连发射击训练、演习、战场杀伤破坏评估中弹丸定位及自动报靶的声电定位装置。
1 声电定位原理
声电定位的主要优点在于测量精度高,工作与光照条件无关,可以全天候工作。
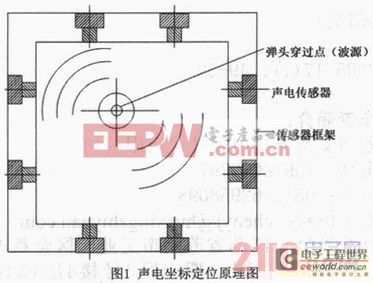
对装于“口”型布阵靶框内侧的声学传感器来说,枪械类型和射击距离不同,其探测到的传感器信号不同,波形也会有所不同。在一个矩形木质框架上装入若干个声电传感器,当弹头从框架内穿过时,冲击框架内的空气使之产生扰动,形成一个冲击波向周围扩散(弹头穿过点即为波源),离波源最近的传感器最先捕捉到该波,启动检靶仪开始计时,其余各传感器依次接收到该波,这样就获得若干个时间差,通过这些时间差及弹头速度(波速),进行运算处理,就可以确定波源位置,即弹头穿过位置。把这个框架作为射击靶,就可以确定弹头在靶子上的弹着点。其原理图如图1所示。
2 系统组成
系统由靶标、检靶仪、终端无线分机等组成。靶标由传感器、靶框、声学空腔组成,靶标采用木制薄框,附加2mm厚防弹钢板,最外层是特制靶板;如果装在靶车上可以无线遥控,实现前后移动,满足7m、15m、25m打靶的需要,靶标可以90°左右转动和90°上下翻转。终端无线分机由语音及换射手开关、工控主板、通讯模块、数据处理器、机箱、电源等组成,便携靶机通过天线接收前端的数据信号,携带方便,可以实现室内、室外、野外等多种训练。敞开形超声靶标利用飞行弹丸通过靶标时弹头波到达不同传感器所产生的时间差,确定弹丸在靶面上的位置。敞开形超声靶标包括8支孔式传感器、框阵阵列、防护钢板、木质靶框、幕布、吸声毛毡。
2.1 超声传感器的工作原理
当子弹穿过靶标时,弹头波在其脉冲压力作用下通过空气介质向四周传播,直至遇上微孔管,部分激波通过微孔管到达传感器。各个传感器的时差由无线传输模块传给工控计算机,通过计算机解析来显示弹丸位置,以此实现弹着点自动报靶。其结构简单、定位精度高、不受外界环境影响,通过孔式传感器和幕布的方式解决多位无干扰和连发的问题,射击瞄准点指示物无特定要求。
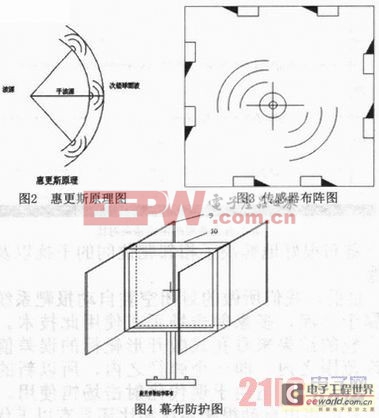
根据惠更斯原理的子波思想:在波动的每一点,都有一个独立的源,它为进一步传播波创造条件,惠更斯还指出:“在一己知波前上的所有的点,都可以看作产生次级球面波的子波元,它们仍以在该媒质中的波速向前传播”,见图2。我们在传感器的前端加上微孔管,所以传感器接收波是有方向性的,而且通过实验证明:波在每一个微孔管里传播的时差是相同的,大约是210 μs。其定位方法采用的是传感器的时差计算方法,在其前端加上微孔管,不影响原来的计算方法,只是传感器的坐标应该输入其微孔管前端的坐标,统一把波在微孔管里的传播当作一系统误差,在软件后端处理。图3所示为超声传感器在靶标中的布阵将针式指向性传感器针管按逆时针走向,装入木质靶框上。当弹头波穿过靶面时,传感器指向直接决定对有效波的采集情况,如何只对本靶面波源敏感,而屏蔽相邻靶位与环境噪声的影响,是定位系统研究的一个重要方面。在实际应用中,我们通过反复实验,得到了针对超音速敞开靶标使用的传感器布阵。在孔式传感器的后端给传感器作了很好的封闭处理,在靶框外0.5m处几乎接收不到波,为了更好地实现野外连发射击,我们在两相邻靶框中间加一幕布,完全解决了相邻靶位间的干扰问题,见图4(其中9:幕布,10:敞开形靶标)。
3 实验结果与分析
实验是在专业射击场内进行的,在现有封闭空腔的自动报靶系统的基础上,后端软件处理和封闭空腔的自动报靶系统的软件处理相同,都采用无线方式接收数据。实验环境温度:25℃左右,弹丸着靶速度大于340m/s,弹丸直径为7.62mm,灵敏度设为70,射击距离为25m,79微冲实弹射击,各个传感器来数情况和报靶结果的对比见表所示1,从实验中任意选几组。 (其中的“新”为针式声传感器,“旧”为普通传感器)
- 基于单片机的多媒体教学幕布控制系统设计(08-11)
- 基于单片机的多媒体教学幕布控制系统的设计(08-10)
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)