基于模糊PID的电阻炉温度控制系统
3 系统的软件设计
控制系统软件部分主要包括主程序、采样子程序、模糊PID控制程序、定时子程序等。程序采用C语言编写,调试工具采用单片机AT89C 52的配套调试软件KEIL C51。
3.1 主程序设计
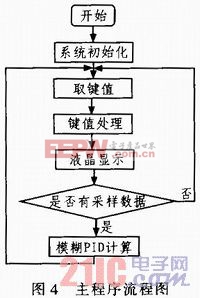
系统上电或复位后,在单片机的控制下自动进入控制系统主程序。首先对单片机及各种芯片进行初始化操作,包括各个端口的初始化、变量的初始化、定时器的初始化及编写模糊整定查询表等。待输入目标温度值后,进入后续程序。主程序把其余部分联接起来,构成一个无限循环图,控制系统的所有功能都在这个循环中周而复始地或有选择地执行。各种子程序都挂接在主程序上,主程序流程如图4所示。
3.2 A/D采样及处理
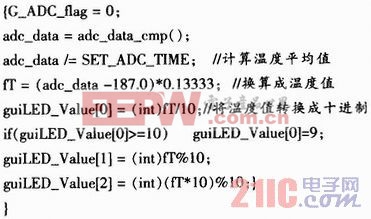
A/D采样及处理属于数据采集部分,其作用是完成对炉温的实时检测(每1秒钟采样一次),将检测到的电压值(经温度变送器和精密电阻转换)经过A/D转换部分进行模数转换,变成相应的数字量送入单片机AT89C52,保存在事先定义好的数组(10个元素)单元中。重复检测十次,将数值存满数组。为了去除干扰,进行均值滤波,去掉其中的一个最大值和一个最小值,将剩余的八个检测值求出平均值,为该时刻的检测值,存入相应单元。该部分主要程序代码如下:
3.3 液晶显示与按键驱动部分
液晶显示屏和按键是最常用的输出和输入设备。该系统中采用3个独立的按键作为输入控制键,LCD12864液晶显示屏作为输出设备。作为输入处理部分的3个按键的功能分别为选择、调整和确认。系统上电运行时,可以通过选择键循环选择设定温度的3个位和OK选项,当其中某项被选择后,其下面出现横线来标识。在设定温度的3个位上,可以通过调整键进行0~9的循环选择,当选中合适的数字后,可以按确认键进行值的确认。三位都调整确认完毕后,通过选择键选中“OK”,按确认键,这样系统将启动运行。
3.4 模糊PID计算
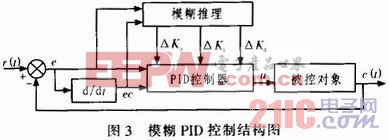
模糊PID计算是整个系统的核心部分,主要是设计模糊PID控制器,其中的e和ec的论域均为-3~+3。在实际的控制过程中,在加热至e为150之前,占空比为1,全速加热,当进入e≤150的区域后,才启动模糊PID进行计算,通过不断调整△Kp、△Ki和△Kd的大小,控制输出量u的大小,最后使电阻炉的温度达到平衡。
4 仿真实验
系统中分别采用常规PID控制、纯模糊控制和模糊PID控制3种控制方法,利用MATLAB进行仿真实验,从调节时间、超调量和稳态误差方面比较它们的控制性能。
通过前两种控制方法的仿真实验,对于常规PID控制,当给定温度值为500时,调节时间约为1 200 s,超调量约为22.9%,稳态误差为零;对于纯模糊控制,给定温度值为500时,调节时间约为1 000 s,超调量为20℃,最终的稳态误差较大,约为10℃。
最后对模糊PID控制方法进行仿真实验,对各输入参数进行模糊化处理,取e的量化因子Ke=0.02,ec的量化因子Kec=0.1。对输出量进行解模糊化,得到△Kp、△Ki和△Kd的比例因子均为0.1。选取经过优化后的初始PID参数,使Kp=0.15、Ki=0.001、Kd=1.7。得到的模糊PID控制仿真曲线如图5所示。

由系统的仿真曲线图可见,模糊PID控制的性能指标为:调节时间约等于3 500 s,超调量约为7.5%,稳态误差为零。
经过对常规PID控制、纯模糊控制和模糊PID控制3种控制方案的仿真研究和分析,明显看出,PID控制响应曲线超调量最大、调节时间较长、最终的稳态误差为零;纯模糊控制响应曲线超调量最小、调节时间最短、但是最终的稳态误差却很大;将两种控制算法结合在一起的模糊PID控制策略可实现减小超调量、稳态误差为零等非常理想的性能指标。温度控制的延迟是变化的,对于温度控制这样的非线性、有延迟的复杂的控制对象,模糊PID控制器显示了明显的优越性,性能指标要比常规PID控制器改善很多。
5 结论
文中将模糊控制算法引入传统的电阻炉温度控制系统构成模糊PID控制系统。通过将常规PID控制方法、纯模糊控制方法和模糊PID控制方法进行仿真对比,发现模糊PID控制方法具有较好的动静态响应特性和较强的鲁棒性,还能够消除系统余差,这对具有非线性、时变和延迟等特征的控制对象尤为适用。并且该方法设计比较简单,易于实现,适合于工业控制应用。
- 基于TMS320F2812的分布式温度采集记录仪的设计与实现(11-29)
- 基于Fusion的无线扩散炉温度自动监控系统 (06-04)
- 基于CC430F5137的无线温度采集报警系统设计(07-10)
- 基于89C52单片机的温度监测系统设计(10-24)
- 基于DSP的数字温度传感器控制系统(11-28)
- 基于MSP430的温度控制系统的设计与实现(01-03)