基于802.11b与安卓手机操控机器鱼的研究
时间:08-24
来源:互联网
点击:
本项目采用MSP430F149单片机作为鱼体控制芯片,它是一种高性能、低功耗的16位控制器,广泛应用于通讯控制设备中。作为控制芯片,MSP430F149单片机显著特点是高效、低耗。它的数据处理能力非常强大,虽然寻址方式广泛(7种源操作数,4种目的操作数),但只需要简洁的27条指令即可完成,而且耗电量非常少,能够有效延长机器鱼下水的时间,非常适合做机器鱼控制芯片。
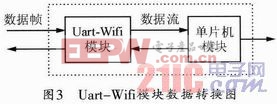
MSP430F149单片机作为“鱼体”的主控MCU,主要用来接收米自Uart-Wifi模块的数据流和控制机器鱼舵机的运转。我们用的机器鱼为三关节杆系机器鱼,这种利用杆系结构来模拟真鱼的运动的操作比较简单,只需要头尾部的配重和鱼尾各个关节转动的角度即可。
机器鱼的动力来自舵机部分,三关节机器鱼有三个舵机,每个舵机由十五位的不同占空比的PWM波控制转动不同的角度,继而控制“鱼体”摆动形成鱼体波。鱼体波是利用杆系机器鱼对真实鱼游动形态的拟合,可以认为鱼体波曲线是鱼体波幅包络线和正弦曲线的合成,它开始于鱼体的惯性。根据鱼体波原理我们编写下位机程序让单片机计算出各个关节的转动角度,产生相应的控制信号控制舵机的运作,使三个舵机相互配合产生相应的鱼体波,推动机器鱼前进。主控芯片的流程如图4所示。

5 电源及驱动模块
电源模块主要分为供电电源和稳压模块,供电电源主要为机器鱼的硬件部分提供电能,稳压模块主要完成对各硬件模块进行供电和稳压。
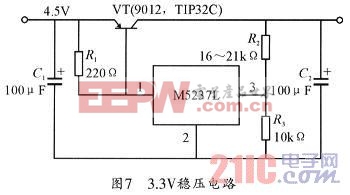
对于此项目稳压模块主要完成3.3V和5V稳压。我们采用7805稳压器组成的输出5V的电源电路完成5V稳压;采用M5237L外接晶体管VT1构成的输出1A/3.3V稳压电源电路完成3.3V稳压。其各部分稳压需求如图5所示。
如今安卓智能手机和Wi—Fi都已非常普遍,甚至美国联邦政府总务署都采购Android手机供政府人员使用,Android平台已经成为最具影响力的操作平台之一。Wi—Fi技术的发展也相当成熟,如今已经广泛的应用于各个领域。本文应用这两项先进技术提出了一种以安卓平台下的智能手机和Wi—Fi技术为基础的操控系统,该系统成功控制机器鱼正常运转,且控制效果良好,可以相信该操控系统在军用、民用和其他领域都有广阔的应用前景。我们对它的控制方法的研究只是一个开始,但已经向前迈出了重要的一步,相信在不久的将来一定会有广泛的发展。
虽然我们在这方面取得了一些成果,但由于经验,技术以及经费等各方面的原因,我们的研究还有许多计划没有实现(例如:我们希望在机器鱼上安装传感设备和自动控制设备,使机器鱼具有自动控制能力,希望通过手机联网实现实时远程控制),而且目前的研究成果也存在许多不太理想的地方,希望在下次设计中得以改进和完善。
- 基于DSP的机器人视觉伺服系统研究(04-17)
- 基于DSP的自动避障小车(04-05)
- 基于DSP的双足机器人运动控制系统设计(06-21)
- 嵌入式机器视觉系统中ARM与DSP的数据通信方法(11-20)
- 用于日本震后救援的机器人技术(03-03)
- 基于DSP的仿生机器蟹多关节控制系统的实现(07-04)