基于ARM自主避障机器鱼设计

1.4 摄像头模块
为机器鱼配备的摄像头是CMOS数字图象传感器。采用的是Ommvision公司的OV9650,OV9650具有130万的像素、10Bit的数据接口与标准SCCB接口,其分辨率达1280x1024并采用CSP-28封装该摄像头用类似于IIc总线的Secb总线连接到ARM主芯片的IIc接口进行通信。在ARM芯片中,摄像头的接口控制模块(CAMIF)由图像采集模块、视频预览尺度模块、模式混合模块、特殊功能寄存器(SFR)模块、码流尺度模块、视频预览DMA模块以及码流DMA模块构成。COMS摄像头OV9650输出的ITU-656格式视频码流,经CAMIF处理后,将采集到的视频码流成两路不同的格式进行传输,两路格式不同的信号分别进入不同的帧存储单元进行存贮,之后根据ARM控制器的指令通过视频DMA通道进行传输。摄像头原理如图3所示。
1.5 LCD模块
LCD液品显示器是(Liquid Crystal Display)的简称,LCD的构造是在两片平行的玻璃当中放置液态的晶体,两片玻璃中间有许多垂直和水平的细小电线,透过通电与否来控制杆状水晶分子改变方向,将光线折射出来产生画面。LCD有扭转式向列型(Super Twisted Nematic,简称STN)和薄膜式晶体管型(Thin Film Transistor,简称TFT)两种主流类型。因为TFT有反应速度快、可视角度大、色彩丰富、分辨率高、对比度、亮度高等优点,所以我们选择TFT的LCD。LCD硬件原理、LCD控制器功能如图4所示。
LCD的工作受其控制器控制完成,图5为LCD控制器功能图。通过LCD控制器的寄存器组REGBANK来对LCD控制器的各项参数进行设置。而LCDCDMA则是LCD控制器专用的DMA通道,负责将视频数据从显存(显存是SDRAM中的一块区域,可利用REGBANK编程设定)中取出,并从VIDPRCS从VD[23:0]发送给LCD屏。同时LPC3600和TIMECEN负责产生LCD屏所需的控制时,然后从VIDEOMUX送给LCD屏。TIMEGEN包含可编程逻辑,可通过程序进行设定。TIMEGEN能产生不同LCD屏驱动电路所需要的时序信号。
LCD部分接口介绍。VFRAME/VSYNC/STV接口:传送LCD控制器和LCD驱动器之间的帧同步信号。
VLINE/HSYNC/CPV接口:传送LCD控制器和LCD驱动器之间的同步脉冲信号。
VCLK/LCD_HCLK接口:传送LCD控制器和LCD驱动器之间的像素时钟信号。
VM/VDEN/TP接口:传送LCD驱动器使用的交流信号。
VD [23:0]接口:LCD的像素数据输出端即RGB信号线。
2 系统软件设计
2.1 主程序流程
ARM芯片通过AD管脚对红外传感器的发射模块传送命令。发射模块发射红外线,接收模块接收遇到障碍物反射回来的红外线,根据返回光强产生相应的模拟电压,经过A/D转换器后变成十位的二进制数据量,通过一定算法计算出到障碍物的距离。ARM芯片判断计算出的距离与预设值的逻辑关系,根据结果判断是否进行避障。摄像头采集图片后,将图片缓存于SDRAM中,LCD读取数据并将图像显示出来。主程序流程如图6所示。
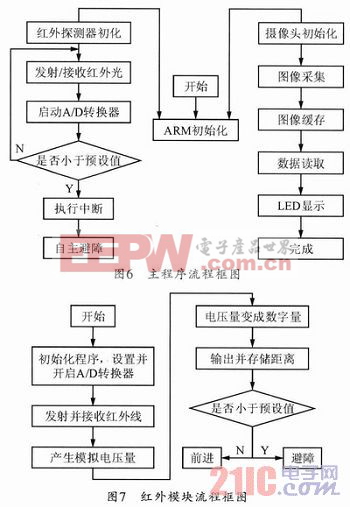
2.2 红外模块
在ARM的A/D进行转换时,首先要对ADC控制寄存器进行初始化,选择进行转换的模拟输入端,进行A/D转换,并从ADCDAT0读取转换结果。探测的结果小于预设值时ARM芯片执行中断,改变PWM波的占空比使机器鱼转向进行避障,反之继续前进。红外模块流程如图7所示。
2.3 摄像头模块
摄像头属于字符类设备,所以能够像字节流一样被程序访问,而且只能够按顺序读写。Linux内核程序通过设备的位号来寻找摄像头。Linux内核发送测试信号到地址0X9650,以检测摄像头是否存在。OV9650拥有多组寄存器,图像的输出编码方式和分辨率等参数取决于OV9650的寄存器。IIC (Inter Integration Circuit)是指内部整合电路,是常用的标准串行接口。系统是通过IIC总线对寄存器进行整体配置,所以此过程不会占用系统数据总线。考虑到图像传输的效率,所以摄像头与ARM芯片之间的Data[0]~Data[7]的通道仅用以传输图像数据。以下为摄像头的部分初始化代码。
SrcWidth=640-WinHorOffset*2;//CAM_SRC_HSIZE为640,CAM_SRC_VSIZE为480
SrcHeight=480-WinVerOffset*2;//计算得SrcWidth=440,SrcHeight=280
rCIWDOFST=0;//窗口垂直偏移为0
rCIWDOFST=(WinOfsEn31) | (WinHorOffset16) | (WinVerOffset);//水平偏移为100,垂直偏移为100
rCISRCFMT=(131) | (030) | (029) |(64016) | (014) | (480);//30位设置为1后,图像颜色失真,偏彩色
Calculate Prescaler RatioShift (SreWidth,PrDstWidth,PreHorRatio,H_Shin);//计算并设置突发长度
Calculate Prescaler RatioShift (SrcHeight,PrDstHeight,PreVerRatio,V_Shift);//计算水平和垂直缩放比率和位移量、水平和垂直比率
摄像头模块流程如图8所示。
- 基于FPGA的DSP设计方法(08-26)
- 电力电子装置控制系统的DSP设计方案(04-08)
- 基于DSP Builder的VGA接口设计(04-10)
- 基于DSP和USB的高速数据采集与处理系统设计(05-01)
- 数字信号处理(DSP)应用系统中的低功耗设计(05-02)
- 基于DSP的嵌入式显微图像处理系统的设计(06-28)