基于MSP430单片机的倒车雷达设计
一次测距。如果由于障碍物过远,超出量程,以致在T0 溢出时尚未接收到回波,则显示ERROR重新回到主流程进入新一轮测试。
2.2 超声波发射和接收部分软件
超声波的接收及障碍物和汽车之间的距离判断方法,并根据判断出的距离触发报警器工作,其工作原理的流程图如图2.1 所示。
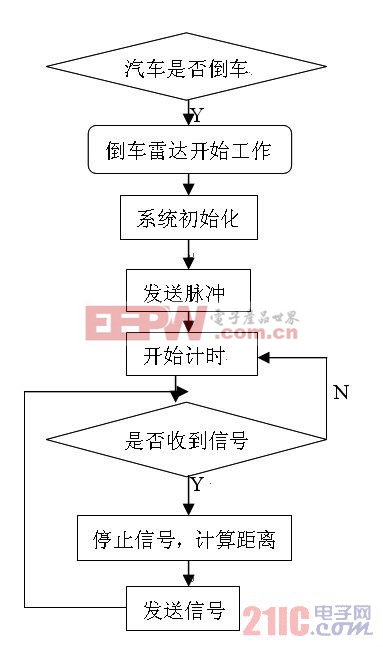
图2.1 超声波测距流程图
超声波发射子程序的任务: 控制时基电路输出若干个超声波,并同时启动T0 开始计时。在此过程中,要计时采用屏蔽中断,开中断等操作,避免外中断影响该子程序的有效执行。
本系统使用一个中断,即外部中断INTO 是超声波有效回送的指示信号,当中断触发时,可以根据时间差计算出超声波的传输距离。内部定时器TO 用来计时,在发射子程序开始时,启动T0 开始工作,而在INTO 中断服务程序时, 停止T0 计时, 并读取计时值用以计算距离。
距离子程序是根据MSP430 芯片计数器所提供的传输时间进行计算,并根据计算得出超声波的传输距离。根据主程序的需要,将相关数据存入相关单元,以供主程序进行下一步处理。INTO 中断服务程序将定时器中的值存入R1、R0 两个寄存器中, 根据模值减去处置所得到的数值得出时间差。传输距离根据公式S=V*T 进行计算。目标物的距离值,也按公式计算,其中T 为测出的额计数器的计时差值,单位为us.使用该公式即可计算出目标物与汽车的距离。
3 总结
系统利用超声波在空气中的可传播性,实时测得超声波在空气中的传播时间和传播速度,在将时间和速度相乘即得距离的原理,设计了一个基于MSP430 的超声波倒车雷达监测报警系统,用于实时测得汽车尾部与障碍物的距离,通过LCD 显示距离值,将距离值提供给司机,该系统具有成本低、非接触、速度快、可靠性强、适应性好、操作方便,有着广泛的应用前景。
实践应用表明,该设计在生产应用和科学研究方面均具有一定的价值。一方面产品设计的人机界面更为人性化,司机可直接通过LCD显示屏观察车后的详细状况,不需要回头就可以倒车,大大减少了汽车司机的工作量,避免了引导车不慎造成交通事故;另一方面系统不断采集汽车与障碍物之间的距离, 并通过语音报警系统实时提醒司机,为我们的倒车提供了更为安全的保障,从而使我们在倒车的时候更方便快捷,同时也更为安全可靠。
- 基于FPGA的DSP设计方法(08-26)
- 电力电子装置控制系统的DSP设计方案(04-08)
- 基于DSP Builder的VGA接口设计(04-10)
- 基于DSP和USB的高速数据采集与处理系统设计(05-01)
- 数字信号处理(DSP)应用系统中的低功耗设计(05-02)
- 基于DSP的嵌入式显微图像处理系统的设计(06-28)