基于DSP的超磁致伸缩换能器驱动电源设计
摘要:为了提高稀土超磁致伸缩换能器驱动电源的效率以及实用性,采用DSP器件TMS320F2812作为主控芯片,结合混合脉宽调制方法实现SPWM波形。采用半桥型逆变电路实现SPWM的功率放大,并对隔离驱动电路、反馈电路和滤波匹配电路进行合理而有效的设计,保证了换能器的输出效能。同时使用电流控制频率的方法实现谐振频率的自动跟踪。实验证明,该驱动电路输出频率稳定,波形失真度低,且能量转换效率较高。
关键词:超磁致伸缩换能器;逆变电源;SPWM;DSP
稀土超磁致伸缩换能器是利用超磁致伸缩材料将电磁能转换为机械振动的器件,与目前广泛使用的压电陶瓷换能器相比,具有工作范围广、转换效率高、响应速度快等优点,主要应用在水声、超声和主动振动控制等领域。其中,超磁致伸缩换能器的驱动电源是影响系统工作性能优劣的关键因素。针对电源控制技术的数字化、智能化发展,文中设计了一种基于DSP器件的数字逆变电源,用以驱动超磁敛伸缩换能器正常工作,同时进行谐振频率的自动跟踪。本课题采用的超磁致伸缩换能器主要用于小型超声波清洗机中,其对驱动电源主要技术指标要求为:输入交流电乐为220 V,输出频率为15~25 kHz,输出功率为50 W左右。文中首先讨论该驱动电源系统的总体设计,然后分别从硬件电路设计和软件实现两方面进行具体阐述,最后进行实验测试并给出结论。
1 系统总体设计
采用的稀土超磁致伸缩换能器的最佳驱动波形为高频正弦波,故设计的驱动电源系统结构如下图1所示。
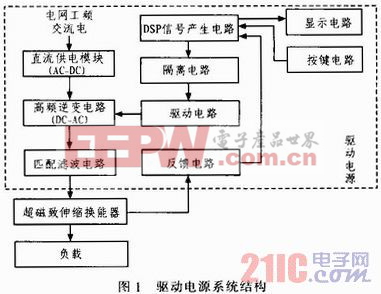
直流供电模块由变压、整流、滤波和稳压电路组成,为高频逆变电路提供直流工作电压;高频逆变电路采用半桥逆变电路,对DSP产生的SPWM波进行功率放大,使其产生指定功率的交流方波;而DSP信号电路产生相应频率的SPWM波,经光耦合电路与功率电路进行电气隔离后,再通过驱动电路使高频逆变电路的功率开关管正常工作;匹配滤波电路用以对SPWM波形进行滤波,将SPWM波形转换为正弦波,同时完成阻抗匹配和调谐功能;反馈电路则对换能器的工作电流进行采样,通过软件可方便实现过流保护,同时根据电流值进行频率跟踪,软件调整正弦波频率,以使换能器工作在最佳状态。
2 硬件电路设计与实现
硬件系统主要由以下几部分构成。
2.1 逆变主电路
逆变主电路包括直流供电模块、高频逆变电路和匹配滤波电路。
高频逆变电路的直流供电采用大电流开关电源芯片L296构成的稳压电路,其最大输出电流4 A,功率为160 W。逆变主电路采用如图2所示的半桥式结构。其中功率场效应管选用IRF820A,其工作额定电压500 V,额定电流2.5 A,且其上升(下降)时间都在10~20 ns之间,可快速开关。同时,上桥臂功率管VT1必须采用悬浮驱动电路进行栅极的驱动,在此采用光电隔离及独立电源供电来实现悬浮驱动。
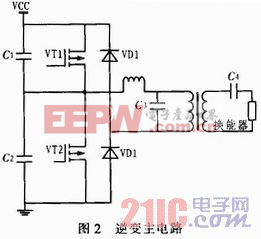
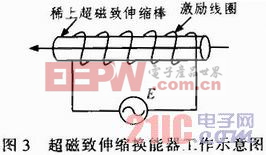
匹配滤波电路的主要作用是滤波、调谐和阻抗匹配。图中L1、C3构成LC低通滤波器,用以滤除逆变输出SPWM波中的高次谐波分量,而高频变压器具有电气隔离和调整电压比的作用。超磁致伸缩换能器工作时,主要是由绕制在超磁致伸缩棒周围线圈上的交变电流驱动,在交变电磁场的影响下,超磁致伸缩棒沿轴线方向做伸缩运动,示意图如下所示。对换能器作等效电路分析,超磁致伸缩棒的作用相当于在电路中又并联了一个电感,故换能器整体呈感性阻抗,故在电路中串联一个可调的匹配电容C4,此时匹配电容C4与交流线圈电感L应满足串联谐振关系: ,其中f为换能器的谐振频率。
,其中f为换能器的谐振频率。
2.2 控制电路
控制电路包括DSP信号产生电路、隔离电路、驱动电路和反馈电路。
DSP信号电路产生用于控制逆变器的SPWM信号,同时完成频率跟踪和过流保护功能,DSP芯片TMS320F2812为其核心部件。TMS320F2812是32位的高性能微处理器,同时具有丰富的片内外设资源。关键是其众多外设中的事件管理器模块可方便的产生所需的SPWM波形。每个事件管理器中有PWM波形产生器和可编程死区产生器,最多可以同时产生八路PWM输出波形,并同时提供亓丁屏蔽的外部供电和驱动保护中断。这提高了系统的集成度与可靠性,且有利于系统性能和状态的监测。同时16个信道12位ADC可方便对反馈的电流信号进行采样,以完成频率跟踪和过流保护功能。
隔离电路对信号电路与功率电路进行电气隔离,采用的是单通道的高速光耦6N137,其中6N137的电源管脚旁0.1 μF的去耦电容应尽量选择高频特性好的电容,在此选钽电容,并尽量靠近6N137的管脚。驱动电路采用一款高速的单通道功率场效应管驱动芯片EL7104,其开关过程中的上升(下降)时间为10 ns,上升(下降)延迟时间为18 ns,完全可以工作在几十至几百千赫兹的开关频率下。隔离驱动电路设汁如下图4所示。
- 嵌入式系统电源的设计与调试详解(05-18)
- 基于DSP的逆变电源控制系统设计(08-11)
- 基于TMS320F2812的数字化三相变频电源的研制(01-15)
- 基于DSP应用于线切割机床的脉冲电源设计(02-01)
- 基于DSP2407的多功能电源控制系统设计(09-08)
- 基于DSP无差拍控制的逆变电源研究(07-31)