超声车距预警系统设计
2.2.5 电源模块设计
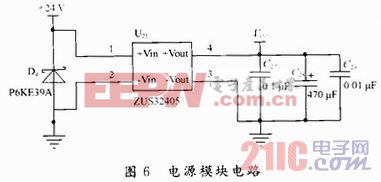
整个系统总电源(即车载电平)是+12 V或+24 V,但本设计系统中的芯片均工作在+5 V左右电压下,因此需要有一个电源模块可以为系统提供+5 V的电压。本设计选用电源模块ZUS32405来为系统提供电压。该模块可以将+12 V或+24 V电压转换成+5 V电压。模块ZUS32405是开关电源,输出端会有一定的波纹噪声,并且模块没有反相保护和过电压保护。因此,在使用电源模块ZUS32405时,需要在输入端加上过电压保护和反相保护,在输出端并联一定值的电容用以消除各频率段的纹波噪声的影响。TVS管(即瞬态电压抑制器)可以作为电源模块的反相保护和过电压保护器件。本设计的TVS管采用P6KE39A。电源模块电路如图6所示。
2.2.6 车速检测电路
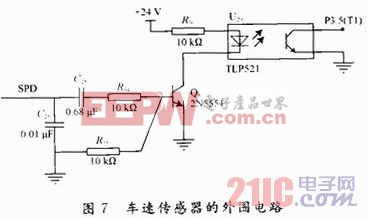
由于车辆是在不断的行进中的,每一时刻相对于障碍物的位置都不相同,因此,需要加一个车速检测电路,用以测出车速,从而对障碍物的距离作出准确判断。本设计采用车速传感器NT-GTS-364,该款车速传感器的工作原理是,车速传感器正前端是金属,这时产生一个高电平,当距离不在(1.2±0.4)mm范围内时,会产生一个低电平,从而产生脉冲。车速传感器一般安装在齿轮变速箱输出轴的测速齿轮附近。
车速传感器的外围电路如图7所示。由于系统所需的供电电源为5 V,而车速传感器需要有24 V的电源接入,因此车速传感器与主控芯片中间需要通过光电耦合器TLP521-1。
2.2.7 语音预警电路
本系统采用ISD4004语音芯片进行语音报警电路的设计,该芯片可实现分段录放。语音电路的主要作用是在车距预警过程中,根据倒车的距离段不同为驾驶员提供不同的人性化的语音提示,使倒车、泊车等动作顺利完成。其可实现录音、放音、复位和静音功能。
单片机的P2.4接ISD4004的片选引脚SS,控制ISD4004是否选通;P1.5接ISD4004的串行输入引脚MOSI,从该引脚读入录放音的地址;P1.6接ISD4004的串行输出引脚MISO;P1.7接ISD4004的串行时钟引脚SLCK。单片机AT89S52的P2.5接录音按钮S3,按下时对ISD4004进行录音操作;P2.6接放音按钮,按下时对ISD4004进行放音操作;P2.7接STOP按钮,用来对ISD4004进行复位。此外,ISD4004的音频信号输出引脚AUDOUT通过一个滤波电容,经低压音频功率放大器LM386后与喇叭相连;MIC接ISD4004的录音信号输入端(ANA IN-,ANA IN+);AMCAP为自动静音端,使用时通过一个1 μF电容接地。

当车与障碍物的距离大于3 m时,语音提示为“请放心行驶”;当倒车距离等于2 m时,语音提示“2 m,2 m”;当倒车距离为1.5m时,语音提示为“减速!减速”;当倒车距离小于等于0.5 m时,语音提示为“危险;停车”。语音预警电路如图8所示。
3 车距预警系统的软件设计
软件系统设计采用C语言编程。软件系统主要包括主程序、定时中断程序、外部中断程序以及以上三个程序需要调用的若干个子程序,有测温子程序、车速检测子程序、距离计算子程序以及语音预警子程序。主程序的作用是完成系统的初始化、读取温度和计算距离值等。定时中断程序主要是用来界定在不同的工作时段内限定超声波的发射和接收。外部中断程序的作用是接收从CX20106A输出的反射波信号,从而知道反射波的时刻。软件设计流程图如图9所示。

本系统在测距过程中,不可避免地会存在测量误差,产生测量误差的主要原因如下:测量基准误差、原理误差、超声波回波时间测定的影响、超声波传播速度的影响、测距盲区的影响、衰减导致的误差等。
本文设计了一种车距预警系统。设计中采用数字温度传感器DS18B20为温度补偿电路,提高了测量精度和智能化程度;采用电源模块降压,使系统能在合适电压下正常工作;采用车速传感器测出车速,可准确测量车辆与障碍物间的相对位置;还有语音电路对驾驶员进行报警,实现系统智能化。并且,系统采用三接收传感器的设计方案来确定障碍物的空间三维坐标,准确判断障碍物位置。本车距预警系统经试验运行良好,性能优良、成本低、测距快,是安装在汽车用以测距的好选择。
- 基于FPGA的DSP设计方法(08-26)
- 电力电子装置控制系统的DSP设计方案(04-08)
- 基于DSP Builder的VGA接口设计(04-10)
- 基于DSP和USB的高速数据采集与处理系统设计(05-01)
- 数字信号处理(DSP)应用系统中的低功耗设计(05-02)
- 基于DSP的嵌入式显微图像处理系统的设计(06-28)