智能采集设备仿真系统设计与实现
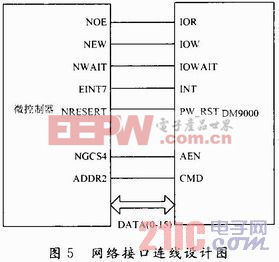
它和微控制器的引脚连接如图5所示,IOR,IOW分别为处理器读写信号;AEN为片选信号与NGCS4连接;IOWAIT引脚为处理器命令就绪信号,低电平时候说明上一条处理器命令还没有结束,这条指令等待;LDATA(0-15)是16位数据总线、NRESET是复位信号;CMD是访问类型信号,低电平访问地址端口,高电平访问数据端口;EINT7是外部中断信号。
3 仿真系统软件设计
Linux具有稳定性、开源性、可裁剪的特性,所以选择将Linux内核作为仿真系统的系统核心。移植大体步骤如下:
(1)U-boot移植:若没有U-boot,两种启动方式都无法在超级终端上显示。U-boot是系统运行时启动的第一段代码,负责调整系统到启动内核的最佳条件,移植时使用JTAG接口下载U-boot。
(2)Linux内核编译:首先要获取内核并配置编译,通过Make menuconfig命令打开系统配置单,根据具体的硬件设置(硬件上面已说明),去除不需要编译的硬件驱动模块,保存配置单。用Make zImage命令编译出zlmage镜像,通过网口烧写到NANDFLASH中。
(3)构建文件系统:使用的软件是busboy,先配置之后编译,过程和Linux内核很像。把构建好的文件系统镜像烧写到系统中,系统就可以正常启动。
(4)CVM移植,CVM是JAVA虚拟机JVM压缩版,系统中没有内置CVM,需要移植CVM虚拟机支持仿真程序。
4 系统验证与测试
大量智能设备都采用RS485串口通信协议,下面以串口采集没备8775A仿真程序测试系统性能。
8775A是青智仪器公司的电参数测量智能仪表,它通过串口与采集主机通信。当它接收到命令格式帧为10H,03H,A1 A2 A3连续帧时会回送数据:7DHA1A2A3D1D2…D52P1P2P37EH。其中7DH,7EH分别代表固定的数据头和数据尾。A1A2A3代表设备地址,30H,31H,35H代表地址15。D1~D52代表该设备提供的数据,分别为电压(D1~D5)、电流(D8~D12)、功率(D15~D19)、功率因数(D22~D29)、频率(D30~D33)、时间(D37~D42)和电能(D43~D49),P1P2P3是送回数据的校验和。采集程序在获取数据后会对连续的数据进行分析,获取有用的数据。该仿真系统在收到发送数据的命令后,判断是否为有效的命令格式,如果是则回送程序模拟的数据,数据格式完全相同。仿真程序流程如图6所示。
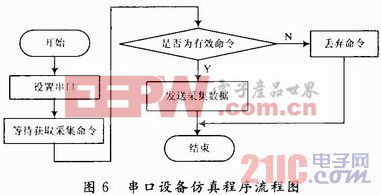
仿真程序设置串口的波特率、校验位、数据位等信息。采集程序中的设置应与其一样。保证采集程序和仿真设备有相同的串口设置。通过验证,采集程序可以从该系统采集到电压、电流、功率等数据。图7是通过串口小助手向仿真系统发送的采集命令后收到模拟软件返回的数据。经验证,与8775A设备提供的参数类型一致。同样,为网络接口的设备也可以通过该系统实现仿真。

本系统首次应用在了国内某大型家电产品公司冰箱测试软件中数据采集部分的测试阶段,通过把编写的智能仪表DA100,UT351,8775A仿真程序下载到本系统中完成了冰箱测试软件采集程序的可靠性测试。
- 基于FPGA的DSP设计方法(08-26)
- 电力电子装置控制系统的DSP设计方案(04-08)
- 基于DSP Builder的VGA接口设计(04-10)
- 基于DSP和USB的高速数据采集与处理系统设计(05-01)
- 数字信号处理(DSP)应用系统中的低功耗设计(05-02)
- 基于DSP的嵌入式显微图像处理系统的设计(06-28)