基于DeviceNet现场总线的工业自动化以太网集成控
出映射表,将O0和I1中的数据映射到相应的设备网上的1203-GK5通讯模块上,然后通过SCANport接口直接映射到变频器。
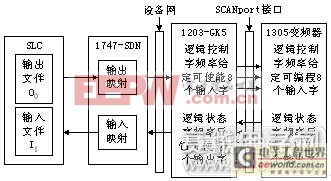
图2 I/O映射表
设备网上的变频器都是以轮询的方式与扫描模块1747-SDN通信。1747-SDN发送查询信息给一个变频器,被查询的变频器发送响应信息给1747-SDN。1747-SDN就按照设置好的扫描列表,扫描整个设备网。这样就建立了一个端口映射的通道。反馈变频器的运行参数时,也是建立这样一个通道。一个扫描周期就可以对网络上所有设备扫描一遍,刷新它们的输入输出映射状态。
由于SLC中的O0和I1文件各有32个字,其中31个字可用。而每个变频器有2到10个字的可调输入/输出字。当有很多变频器在设备网上时,可以通过SLC的MO(输出)和MI(输入)文件实现类似的端口映射。MO和MI文件分别具有150个字。
4 实验系统运行结果及分析
上位工控机使用RSview32人机界面软件与RSlinx通讯软件组态之后就能够采集到SLC传送来的数据,也是通过对O0或I1文件操作,从而对设备网上的变频器进行监视和控制。
通过RSview32可以直观的用图形截面对整个系统的变化以曲线图显示。图3为电机空载启动达到给定频率后立即执行直流制动的整个过程中变频器输出电流、电压、频率曲线。使用2.2kW鼠笼电机,变频器为1305-BA09A,其功率为4kW。变频器的设置参数如下:加速时间为2s;给定频率为30Hz;直流制动的电压为30V,时间为2s。
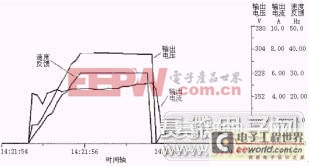
图3 变频器直流制动状态曲线
图3中可以明显观察到制动时的电压和电流。相对应的,图4为使用自由停车的过程,可以看出,使用这种方式停车,变频器的输出电压、电流均为零,电机是依据惯性停车。
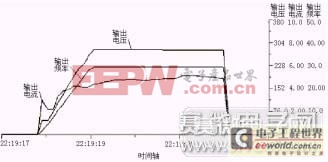
图4 变频器自由停车状态曲线
RSview32是很方便的系统控制软件,但它的刷新时间为50ms,所以显示的曲线精度不高。低层设备网对上位工控机命令的响应有一定的滞后,但是这种方案可以满足大多数实时控制系统。设备网的传输速度为125Kbps,每扫描一次的时间小于10ms,主要的延时是在以太网上。以太网中并没有用路由器,而是简单的使用集线器连接,没有使用IGMPsnooping组播过滤技术有效的防止以太网上的网络冲突。所以以太网数据传输延时的不确定性将会使这50ms的延时提高。
系统实验时,可以在PC机上使用RSlogix500软件对SLC500编程,通过对O0或I1文件(已经与变频器建立映射关系)的读写就能够完成较为复杂的电机协调控制。再运用RSview32能够以直观的图形化的界面对整个运行过程进行监视和控制。这套交流调速远程控制装置稳定可靠,显示出网络控制的思想和意义。系统构成的方法可以作为远程控制系统设计参考。
- DeviceNet现场总线技术在化工行业的应用(12-21)
- 现场总线系统的汽车总装生产线控制系统(12-20)
- 基于DeviceNet现场总线的制管生产线控制系统的研究(12-20)
- 台达DeviceNet现场总线产品在HVAC的应用(12-19)
- DeviceNet现场总线系统的汽车总装生产线控制系统(12-19)
- 欧姆龙DeviceNet现场总线及应用实例(12-16)