基于SCM和PLC的两种步进电机控制方法
00得电发出启动信号,前沿微分指令DIFU(13)保证移位寄存器SFT(10)指令中移位数据初始信号01600的唯一性。移位寄存器在移位脉冲的作用下顺序左移CONTROL ENGINEERING China版权所有,实现6位脉冲分配,由输出继电器10000、10001、10002分别去接通步进电机的A、B、C三相。步进电机转速可由移位寄存器SFT的脉冲输入端控制,转向由继电器02603控制。当输入端00001无效时,KEEP(11)指令的置位端02600保证02603得电且保持该状态,电机正转;当00001为ON时,KEEP(11)指令的复位端02601使02603失电而恢复原状态,电机反转。
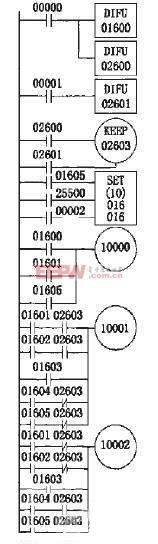
图1 梯形图
4 结束语
比较步进电机的SCM和PLC的控制方法可知。SCM采用定时器延时,以中断方式输出控制脉冲;PLC采用移位指令和内部特殊继电器,以循环顺序扫描方式输出控制脉冲。SCM采用汇编语言(或C语言)编程,其指令系统的同有格式受硬件结构的限制很大,编写和调试要求具备一定语言程序设计基础;而编写PLC程序,即可以采用语句表(助记符),又可以采用梯形图,梯形图简单易懂,通过图形编程器容易实现。SCM控制系统设计周期长,一般需要程序扩展,硬件方面需要经过印刷电路板设计等过程;PLC控制系统采用模块化结构控制工程网版权所有,可在线修改控制程序,并实现实时监控,因而设计周期短。PLC系统扩展灵活,可以在原有控制系统基础上进行功能扩展,能有效降低成本,适应于复杂的工业控制环境。
用SCM和PLC来实现步进电机控制脉冲的产生和分配,可以通过编程在一定范围内自由地设定步进电机的转速,而且还可以灵活地控制步进电机的运行状态。这两种控制方式都不需要反馈就能对位置或速度进行控制,且位置误差不会积累;用软件编程代替硬件控制,不仅减少了系统设计的工作量,而且提高了控制系统的可靠性。
- 嵌入式系统硬件平台的软件PLC实现方法(04-12)
- 利用数字信号控制器实现稳健的PLC通信(05-02)
- 基于Linux系统的软PLC设计(07-19)
- 基于VxWorks的嵌入式实时PLC设计(01-08)
- 基于AT89C51单片机的微型可编程控制器(04-23)
- 基于DSP的光纤监控网络系统方案(08-03)