基于ARM的家用智能垃圾桶设计
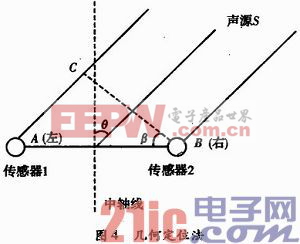
由图4可得
由于AB距离和V声音已知,时延(tA-tB)可由式(1)~式(3)算出,再由式(4)和式(5)可求得声源偏移正方向的角度θ,则可控制电机转动使垃圾桶向用户方位旋转并前进。
2.2 特定语音识别算法
针对特定语音的识别,采用动态时间规整(DTW)的算法,是一种把时间规整和距离测度的计算结合起来非线性规整技术,多用于孤立词的语音识别。语音识别过程如图5所示。
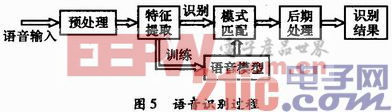
首先应滤掉输入语音信号的噪音并进行预加重处理,提升高频分量,然后线性预测系数等方法进行频谱分析,找出语音的特征参数作为未知模式,与预先存储的标准模式进行比较,当输入的未知模式与标准模式的特征一致时,ARM便识别输入的语音信号并输出结果。
3 系统软件设计
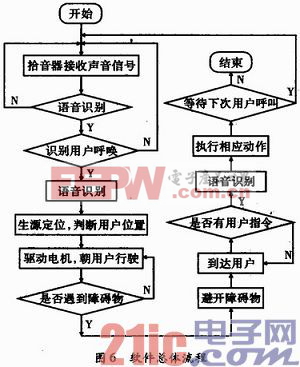
系统软件主要包括:数据采集模块、SCI通讯模块、特定声源定位算法模块和避障软件模块。系统软件总体流程图如图6所示。
3.1 特定声源定位算法设计
系统的声源定位算法主要基于传声器阵列时延估计法,利用A/D采样模块检测不同拾音器所接收到的声音信号,算法实现采用广义互相关法。ARM采样得到的波形接近为正弦波,将对应采样得到的值放入数组中保存,首先进行相关运算,得出互相关谱。为避免误差和杂音的干扰,进行多次计算去除了误差较大的值。其算法流程图如图7所示。

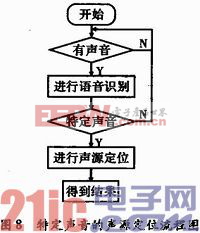
同时,为避免垃圾桶对接收到的任何声音都进行定位,系统在定位时加入了语音识别,即只对需要的声音进行方位判断,对特定声音进行语音识别的流程框图如图8所示。
3.2 避障软件设计
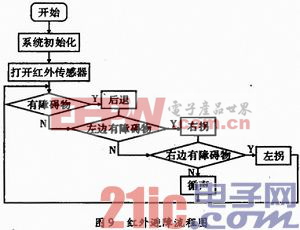
避障软件模块采用对ARM的GPIO口查询方法。在垃圾桶加电后,主函数中一直查询GPIO,某一路的GPIO出现低电平时,进入相应的子函数,执行相应的控制动作。3个红外传感器同时工作,发射红外信号。任何一个红外接收装置接收到反射的红外信号进入相应的子函数执行控制电机转动。红外避障流程如图9所示。
设计的智能垃圾桶“听”到主人的呼喊后能自动到达主人身边,并且能识别主人的声音进行一系列动作,经试验证明该设计能够满足使用要求。
- 基于ARM11的家用智能垃圾桶的设计与实现(11-12)
- 基于FPGA的DSP设计方法(08-26)
- 电力电子装置控制系统的DSP设计方案(04-08)
- 基于DSP Builder的VGA接口设计(04-10)
- 基于DSP和USB的高速数据采集与处理系统设计(05-01)
- 数字信号处理(DSP)应用系统中的低功耗设计(05-02)