PLC在单柱立式数控车床的应用
随着机械行业的技术进步和市场的不断发展,市场需要更高的加工精度和工作效率,普通机床已经远远不能满足用户的要求,数控机床在市场中所占的比重越来越大。价格合理的数控系统是数控机床市场竞争力的重要因素,太原第一机床厂C515立式车床采用DELTA EH系列PLC加DVP 01PU-H单轴定位模块,非常方便的实现了速度控制、定位控制、原点复归、手摇轮MPG输入等多种功能,不仅满足数控设备的功能要求,而且响应速度快,价格合理,值得借鉴。
2 项目简介
太原第一机床厂设计制造的C515单柱立式数控车床,属于大型车床的一种。最大加工直径2300mm;最大加工高度1000mm;最大切削量7mm;最小进给量10um。
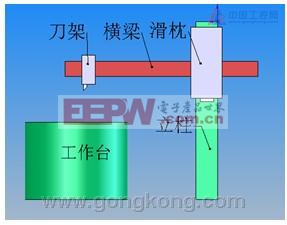
图1单柱立车结构
2.1 主辅传动
(1)驱动部分采用1台30KW高压伺服系统控制工作平台的旋转,2台1.6KW大惯量伺服系统控制水平(X轴)、垂直(Z轴)方向的进给。
(2)传动部分采用减速机和滚珠丝杠加滑块传动,水平(X轴)方向10um/20 pulse、垂直(Z轴)方向10um/30 pulse。
2.2控制要求
(1)通过操作按钮实现水平(X轴)、垂直(Z轴)方向的点动(点动速度通过手调电位器控制)。
(2)过操作按钮实现水平(X轴)、垂直(Z轴)方向变速移动(移动速度通过手调电位器控制),可以随时中止,且不影响下一动作。
(3)原点复归功能。
(4)手摇轮可以迅速且准确的实现水平(X轴)、垂直(Z轴)方向进给,单步最小进给10um,进给速度与手摇轮转动速度一致。
(5)轮控制模式需提供低(x1)、中(x5)、高(x10)共3个速度,既可用于单步定位,又可用于快速移动,方便用户操作。
3 台达数控解决方案
3.1 配置设计
根据系统分析,选用台达EH 系列高性能PLC作为主控单元。DVP 32EH00T(32点200Khz高速输出型主机) + DVP 48HP00R(48点继电器扩充24D+I24DO) + DVP 04AD-H(4点AI扩充) + DVP 01PU-H(单轴定位扩充) + DVP 01PU-H(单轴定位扩充)。 其中DVP 32EH00T主机可输出200K开基极脉冲信号,用于控制工作平台旋转的30KW 380V高压伺服;2个DVP 01PU-H单轴定位模块分别用于控制水平(X轴)、垂直(Z轴)方向的进给;DVP 04AD-H模拟量采集模块用于检测2路电位器调节的电压值作为设定的工作速度。
3.2 主机简介
DELTA EH PLC,程序容量15872 steps,处理速度0.24us,输入/输出点数最大各256个,可扩展8个功能模块,自带双通讯口(可扩COM3)采用MODBUS协议,Easy Link功能可方便实现集联,自带4路高速脉冲输入(最高2路达200K),DVP20EH00T和DVP32EH00T机型支持双路200K脉冲输出。是一款功能强大的PLC主机。系统变量定义如表1所示。
表1系统变量定义 3.3 模拟量采集模块简介 3.4 伺服定位模块简介 4 软件开发 4.1 开发要点 4.2 模入模块编程 4.3 单轴定位模块编程 (1)设定工作模式#CR32前必须先停止输出。
DVP 04AD-H是一款4路14位模拟量采集模块,既可以单独使用,通过RS485通讯远程控制,也可以作为EH PLC的功能扩展,使用FROM/TO指令控制操作,精度高,响应速度快。
进和伺服系统的速度/位置控制的功能。DVP 01PU-H单轴定位模块使用简便、功能完善、响应速度快、价格合理。不仅可接受LSN/LSP/DOG等开关量信号,还可接受200K的A/B相脉冲信号(差动或5-24V开基极)作为手摇轮MPG脉冲输入,可输出200K差动脉冲信号(支持正负脉冲、脉冲加方向、AB相信号),支持电子齿轮比。运行命令(#CR31)提供软件START、软件STOP、点动JOG及原点复归功能的使用。工作模式设定能够实现速度控制、定位控制、手摇轮MPG输入等多种功能。
该数控车床最重要的控制要求是准确的位置控制、变速度控制和快速的响应速度。使用了三个功能模块,主要功能全部通过PLC模块来实现,全部程序不足1000steps。
由于大量使用FROM/TO语句,使用时需注意以下几点:
(1)为了控制程序扫描时间,建议规划使用FROM/TO语句。
模块功能和状态的初始化语句,只需开机时执行一次,建议采用M1002作为执行条件;需要不断刷新和调整的采样或控制指令,可使用M1012上升/下降沿作为执行条件定期执行。
其他需条件满足才执行的语句,建议采用TOP语句,或以相关条件的上升/下降沿作为执行条件。最终的目的是减少执行次数,缩短程序扫描时间。
(2)为避免开始运行时由于初始化内容过多而导致PLC报警,请将D1000中的WDT时间延长。
(3)DTO语句的每批次写入双字节,如果结尾为Kn,则表示写入n个双字节数。
DVP 04AD-H是一款4路14位模拟量采集模块。各路数据采集程序:
DVP01PU-H模块使用注意:
(2)点动JOG模式,运行中无法改变速度,且不受软件START / STOP功能制约。
(3)变速运行模式可以在工作过程中修改速度,但运行方向需要通过设定#CR23位移量的正负或修改#CR5的旋转方向来实现。
(4)建议采用相对位移模式。
编程案例:垂直(Z轴)手摇轮MPG输入控制功能启动(选用不同速比):

- 嵌入式系统硬件平台的软件PLC实现方法(04-12)
- 利用数字信号控制器实现稳健的PLC通信(05-02)
- 基于Linux系统的软PLC设计(07-19)
- 基于VxWorks的嵌入式实时PLC设计(01-08)
- 基于AT89C51单片机的微型可编程控制器(04-23)
- 基于DSP的光纤监控网络系统方案(08-03)