一种ESP电子车身稳定系统地模拟设计
为了演示ESP在提高汽车操纵稳定性方面的作用,结合电子专业的技术知识,通过设计电路图以及对电路图的仿真,并应用相关电手元器件,在玩具小车上模拟ESP的预险警示争主动控制功能,实物运行效果良好。该设计思路和方法推广应用可使更多学生受益。
0 引言
ESP(Electronic Stability Program)是一种主动的智能安全系统,通过高度灵敏的传感器时刻监测汽车的行驶状态,及时识别危险情况,使汽车恢复行使的稳定。ESP系统最早由德国博世(BOSCH)公司于1997年研制成功,该公司的统计表明ESP在汽车上的应用使乘用车的交通事故率降低了20%~50%。近年来ESP在行车方面的卓越功效越来越得到人们的认可,世界范围内新车的ESP装配率显著的提高,根据德国博世公司的统计,2005年德国新车ESP装配率约为72%,西欧的新车平均装配率约为44%,北美约为21%,日本约为15%,在2006年,我们国内的ESP的装配率只有3%,远远低于欧美地区。而在2012年的今天,国内车辆的ESP装备情况仍然不容乐观,只有18%,仅达到韩国2006年的水平。相比于国外,国内汽车行业对汽车动力学稳定性控制的研究起步较晚,国内ESP的装配率还比较低,由于科学技术水平的差距,大多数学者对ESP的研究也只是停留理论研究和模拟仿真解决ESP系统的设计中所具体遇到的问题。同样,这部分市场也完全掌握在外资企业手中,国内企业几乎无法涉足,所以,要努力攻克ESP设计的理论与关键技术,对提高国产汽车的自主开发能力、缩短与发达国家的差距具有重要的现实意义。
本文正是基于ESP电子车身稳定系统的原理,结合电子专业的技术知识,通过设计电路图以及对电路图的仿真,从理论上达到了ESP系统警示驾驶员和主动制动汽车的目的,并且应用相关电子元器件,在玩具小车上模拟ESP系统的预险警示和主动控制功能。该设计演示了ESP在提高汽车操纵稳定性方面的作用。
1 ESP控制汽车运动流程
ESP电子车身稳定系统是一种提高车辆曲线行驶稳定性的主动安全系统。当出现异常情况时,ESP会根据实际情况作出反应,而不是盲目地服从于驾驶员,使汽车行驶安全性大大提高。ESP电脑计算出保持车身稳定的理论值,与偏转率传感器和横向加速度传感器测的的数据进行比较,发出平衡纠偏指令,使汽车回到预定的轨道行驶,保持车辆正常行驶系统控制流程如图1所示。
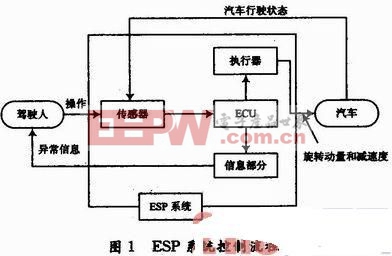
基本控制程序如下所述:
(1)汽车在正常行驶状态下,ESP控制单元(图中的ECU模块)接受来自转向盘角度传感器和轮速传感器的信号,经过计算和监测,获知驾驶员操纵汽车稳定行驶的方向信息,并储存这些数据。
(2)ESP控制单元ECU同时接收来自横摆角速度传感器和横向加速度传感器的信号,经过计算,获取实际车辆行驶的状态。并将数据和(1)中监测的数据进行对比,判断汽车此时是否处于稳定行驶状态(驾驶员对汽车操控行驶的方向信息和稳定行驶的方向信息对比一致则为汽车稳定行驶状态)。
(3)经过对比,如若两者信息一致,则ESP控制单元判断汽车此时处于安全行驶的稳定状态,ESP系统处于待命状态。如若两者信息不一致,ESP控制单元判断汽车此时处于非稳定行驶状态,ESP控制单元下达控制命令到执行器(液压调节单元),通过对发动机的干涉,利用液压执行器对每个车轮进行制动,及时纠正车辆的不稳定行驶状态,确保人身安全。
2 ESP电子车身穗定系统的模拟设计
2.1 模拟设计的思路及原理分析
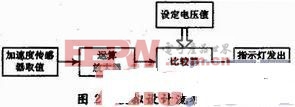
根据ESP电子车身稳定系统的原理,ESP最大的特点在于它的主动性,能够在发生危险时及时提醒驾驶员,起到事先提醒的作用。图2为预警功能模块电路板的设计流程图,通过加速度传感器的取值和预先设定的电压值(模拟实际ESP系统电子控制单元的稳定值)进行比较,根据实际模型小车的行驶情况,来判断是向左加速还是向右加速,从而通过指示灯的亮灭给驾驶员发出警告,车辆出现的不稳定行驶状态。
2.2 模拟设计的电路原理图
在汽车的实际行驶过程中,由于各种原因出现侧滑或者转向过度、躲避障碍物等突发情况,ESP电子车身稳定系统会主动感知到汽车行驶的不稳定状态,电子控制单元通过对各个传感器采集数据的分析和判断,主动采取干预措施,防止发生意外事故。但在实际的测试中,由于实验条件的差异性,无法模拟到真实汽车在遇险时的处理过程,主要是模拟小车在急速转弯的情况下,实验小车出现不稳定性行驶状态,ESP电子车身稳定系统开始由待命状态进入工作状态。
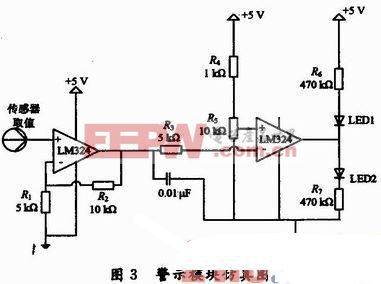
图3是模拟处理采集信号的过程,依次对采集到的传感器信号进行放大、比较处理,从而通过发光LED灯来判断实验小车的行驶状态。
2.2.1 电压放大模块
在该设计的模块中,由于实验小车的本身的速度的局限性通过加速度传感器采集到的电压信号较弱,需要对电压信号进行放大。主要采用芯片LM324对模拟信号进行放大,便于后面的电压比较器处理。由于采用的加速度传感器芯片的特殊性质,在0 g或者静止的情况下,输出模拟电压大概为1.2 V,经过电压放大模块以后,电压由原来的1.2 V放大到1.8 V左右。由图3可以看出,采用同相比例电压放大,由管脚1输出来的电压就是1.8 V,根据设计的原理图,由反馈回路上的两电阻比值得知,运算放大倍数为3倍,由于实际测试的时候LM324运算放大器采用3 V直流电源供电,所以同相比例放大器没有按照理论上的3倍进行放大,而仅仅放大了1.5倍,经过放大的1.8 V的模拟电压信号经过滤波电路,接入到比较器的6管脚,与设定的电压值进行比较。
2.2.2 电压比较器模块
在电压比较模块中,选择LM324芯片作为比较器,比较器正向输入设定的电压值,以此来模拟汽车在稳定行驶时的数据,实际小车测到的实验数据接入比较器负向输入。理想状态下,当实际测得电压值小于设定的电压时,比较器逻辑出高电平,则根据电路原理图可知,LED1不发光,而LED2发光,相反,如果实际测得电压数据大于设定的理论值,则比较器逻辑出低电平,此时LED1灯发光而LED2灯不发光。通过LED的亮灭,来判断此时小车是否是加速度过大,是否是稳定行驶的状态。
在测试过程中,由于电压比较器的供电电压也是3 V的直流电源,所以模块一经上电,LED1就会点亮,表示电路工作正常,模拟实际汽车行驶的安全状态,此时ESP不工作;当加速度传感器感应到危险状态,输出模拟电压较大电压时,实验小车不在预定的状态行驶,此时LED2点亮,而LED1熄灭,LED2灯点亮发出警告此时小车处于不稳定行驶状态,同时也预示,汽车的ESP系统要从待命状态进入工作状态。在实际演示过程中,经过多次试验,设定的电压值为1.8 V是比较合适的。
2.3 实验制动模块的模拟设计
ESP电子车身稳定系统在工作时,当ECU接收到轮速传感器传来的信号时,电子控制单元就会下达相关指令到执行器一液压调节器。液压调节器通过控制各个车轮的制动回路,来主动调节汽车行驶的不稳定状态,及时纠正汽车的行驶方向,使汽车主动回到预定的行驶轨道,保证行车安全。
2.3.1 制动模块模拟设计的原理分析
考虑到实验小车的驱动模块已存在,无法对驱动模块进行干涉,在模拟设计中,主要采用继电器对小车的驱动后轮电机进行短暂的制动,继电器主要起转换电路的作用,通过三极管NPN9013的导通与截止,来控制继电器工作,当继电器工作时,继电器线圈有电流通过,产生电磁力,吸引继电器内部衔铁转换电路,切断后轮电机的工作回路,电机停止工作;短暂的时间后,继电器断电,内部开关主动回到原来的位置,小车继续工作。
2.3.2 制动模块模拟设计的原理仿真图
该设计模块主要模拟ESP电子车身稳定系统在工作时,对汽车行驶状态进行主动干涉效果。由图4可知,当预险警示模块得到逻辑高电平时,三极管基极得到高电平。此时三极管导通,继电器线圈瞬间有电流通过,产生电磁力,吸合衔铁,图4中的继电器内部开关由静触点换挡到动触点,此时,电路导通,LED4灯点亮,表明有信号输入,且信号为高电平。
- 什么是ESP(12-20)
- ESPU0808加密芯片在防抄板领域的应用技术解析(05-12)
- 基于ESPU软件保护模块的版权保护方案(03-21)
- 基于DSP的光学探测陀螺稳定系统的设计(01-04)
- 基于CPLD+DSP的实时数字图像稳定系统(08-07)
- 汽车电子稳定系统(ESP)详解(12-20)