利用纯软件实现单片机远程通信的设计
要用纯软件方法实现GMS97C2051单片机之间的远程通信,首先必须将单片机的TTL电平的软件方法转换为差分电平,其次要用普通I/O口线来构成软件串行口,并且在软件上进行正确的配合。
TTL电平转换成差分电平的纯软件方法
TTL是IP协议包中的一个值,它告诉网络,数据包在网络中的时间是否太长而应被丢弃。有很多原因使包在一定时间内不能被传递到目的地。解决方法就是在一段时间后丢弃这个包,然后给发送者一个报文,由发送者决定是否要重发。TTL的初值通常是系统缺省值,是包头中的8位的域。TTL的最初设想是确定一个时间范围,超过此时间就把包丢弃。由于每个路由器都至少要把TTL域减一,TTL通常表示包在被丢弃前最多能经过的路由器个数。当记数到0时,路由器决定丢弃该包,并发送一个ICMP报文给最初的发送者。
GMS97C2051单片机的信号均为TTL电平。TTL电平信号传输距离非常有限,一般在9600bps传输率时传输距离不超过5米。而差分电平信号则是取决于两种信号线之间的电平差值,如果某条信号线的电平高于另一条,则信号为1,否则为0.由于差分电平信号可以避免长距离传输导线上的电荷积累,并且具有更宽的电平范围,所以传输距离远得多。RS485差分电平信号在9600bps传输率时传输距离可达1200米。为了用纯软件实现差分电平传输就不能使用GMS97C2051本身的硬件串行口,而是用普通I/O线来实现串行通信。差分电平要用两条I/O口线来实现,比如P1.2和P1.3两条线(见图1)。当传输信号为1时,P1.2为+5V,而P1.3为0V.当传输信号为0时,P1.2为0V为0V,而P1.3为+5V.注意P1.2和P1.3不得同时置+5V或同时置0V.
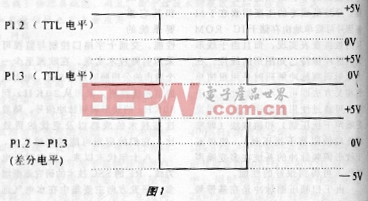
为了用纯软件实现差分电平传输就不能使用GMS97C2051本身的硬件串行口,而是用普通I/O线来实现串行通信。差分电平要用两条I/O口线来实现,比如P1.2和P1.3两条线(见图1)。当传输信号为1时,P1.2为+5V,而P1.3为0V.当传输信号为0时,P1.2为0V为0V,而P1.3为+5V.注意P1.2和P1.3不得同时置+5V或同时置0V.
GMS97C2051单片机的P1.0和P1.1可以分别作为片内精密模拟电压比较器的正输入端(AIN0)和负输入端(AINI),所以正好可以用于接收差分电平信号。内部电平比较器的输出已经在芯片内部连到P3.6口,所以可以通过读取P3.6口的值来得到差分电平信号。
软件串行口的实现方法
串口叫做串行接口,现在的PC 机一般有两个串行口COM 1 和COM 2 .串行口不同于并行口之处在于它的数据和控制信息是一位接一位地传送出去的。虽然这样速度会慢一些,但传送距离较并行口更长,因此若要进行较长距离的通信时,应使用串行口。通常COM 1 使用的是9 针D 形连接器,也称之为RS-232接口,而COM 2 有的使用的是老式的DB25 针连接器,也称之为RS-422接口,不过目前已经很少使用。
串行端口(Serial port),或称串列埠、序列埠、串口,主要用于串列式逐位元数据传输。常见的为一般电脑应用的RS-232(使用 25 针或 9 针连接器),工业电脑应用的半双工RS-485与全双工RS-422.串口叫做串行接口,也称串行通信接口,按电气标准及协议来分包括RS-232-C、RS-422、RS485、USB等。 RS-232-C、RS-422与RS-485标准只对接口的电气特性做出规定,不涉及接外挂程式、电缆或协议。USB是近几年发展起来的新型接口标准,主要应用于高速数据传输领域。
采用差分电平通信的软件串行口的硬件接线图如图2.A、B两机均为GMS97C2051单片机。P1.2和P1.3用于发送,P1.0和P1.1口用于接收,P1.0同时接本机中INI0.软件串行口一般全用标准的10位异步通信格式:1位起始位(信号0),8位数据位,1位停止位(信号1)。接收时均是低位数据在前,高位数据在后。

软件串行口接收和发关的工作原理和过程如下:单片机复位后,执行初始化程序时,定义P1口为位控方式,其中P1.0和P1.1定义为输入,P1.2和P1.3定义为输出。P1.2初始化为"1",P1.3初始化为"0",这样发送信号处于停止位(差分电平"1")。定义INT0为负沿触发。允许中断且定义成高优先级,然后开中断,两机进入随时可开始串行通信的等待状态。A、B不通信时,两机的收发均为"1",一旦某机(假设为A)需要与对方通信,A机以约定的波特率(假定为9600bps),
- 用AVR纯软件模拟电子时钟(11-20)
- FPGA的DSP性能揭秘(06-16)
- 基于单片机通用引脚的软件UART设计(10-16)
- 分时操作系统思想在单片机中的具体应用 (10-30)
- 基于AT89C51+DSP的双CPU伺服运动控制器的研究(05-26)
- 关于RTX51 TINY的分析与探讨(05-30)