MSP430单片机的特点及在接收机中的应用
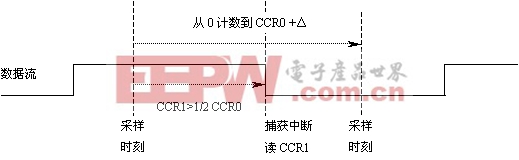
计数时刻之间,说明同步时钟相对于码元相位滞后,为保证每次采样时刻在码元的中心位置,就要把采样点提前至第2个计数时刻。
方法二、
根据MSP430单片机硬件特点,我们对上述同步方法进行了优化,并达到了良好的同步跟踪效果。
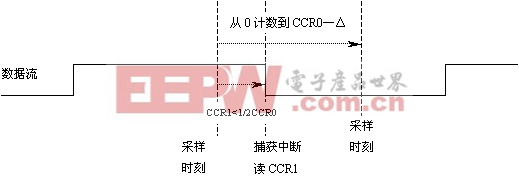
设置接收端恢复出的同步时钟的频率等于码元频率。每一个计数中点均为采样时刻。与5倍时钟法相同,它也需要捕获和同步跟踪两个步骤。捕获的过程与上述的方法相同。同步跟踪,可以使采样时刻基本稳定在码元中心位置。如图2,恢复出的同步时钟与码元同步时,数据跳变沿的发生时刻与前一采样时刻的距离(D)等于二分之一码元宽度(M)。 (二)、方法二的具体实现 MSP430单片机的Timer_A可支持同时进行的多种时序控制、多个捕获/比较功能、各模块独立编程,中断可以由计数器溢出引起,也可以来自捕获外部信号的跳变沿。 MC1 和MC0选择计数器工作模式,MC1=0、MC0=1时定时器增计数至比较寄存器CCR0的值就会产生中断,用这种模式可以产生固定频率的中断信号作为同步时钟。当增大或减小寄存器CCR0的值时,即可改变定时的时间间隔,从而调整同步时钟的频率。由于定时计数器的调整精度为一个时钟周期 1/4.3ms(外部时钟晶振4.3MHz),所以可以产生频率精确的同步时钟。 捕获模式用于确定事件发生的时刻,可用于速度计算或时间测量等场合。如果在选定的输入引脚(如图P1.2)上发生选定的脉冲触发沿(上升沿、下降沿、任意跳变),则定时器的计数值被复制到捕获寄存器CCR1中,并产生中断。因此,读出CCR1中的值就可以记录跳变沿发生的时刻,根据跳变沿发生时刻与前一采样点比较的结果,调整同步时钟,超前或滞后,重新预置CCR0。 从表中看出同步时钟的采样点逐渐收敛在码元中心位置,并且-在以后的接收过程中,实现跟踪。 (三)、小结 由于采样时钟恢复和同步捕捉跟踪都需要响应中断服务程序,占用CPU开销。而CPU 的主要工作是进行每帧数据的解码和发送。如果使用第一种同步方法,时钟频率4.8K*5,CPU时钟为4.3MHz,即程序每运行41.6us、约20条程序语句就要响应一次定时器中断服务程序,增大了运算量。 五、帧同步 在数字信息传输中,帧同步信号是一些特定的码组,这种帧同步码组通常是在某段时间集中插入信息码流。考虑到时间位置的确定,要在建立了各码元的正确时间关系后才有能实现,所以帧同步一般是在位同步的基础上实现。 (一)、对帧同步系统的要求 1、 帧同步的捕捉(同步建立)时间要短, 2、 在一定的同步引入时间要求下,帧同步信号占用的码组长度应越短越好。 3、 同步系统的工作要稳定可靠,一旦建立同步状态后,系统不应因信道的正常误码而失步,即帧同步系统应具有一定的抗干扰能力,能识别假失步和避免伪同步。 数字信号在传输过程中总会出现误码而影响同步。一种是由信道噪声等原因引起的随机误码。此类误码造成帧同步码的丢失往往是一种假失步现象。然而,无论选用何种帧同步码型,信息码流中都有可能出现与帧同步码图案相同的码组,即伪同步码。 (二)、帧同步的实现 本接收机使用集中插入特殊码元的帧同步方法,集中插入就是把特殊的帧同步码组集中插在一帧的特定位置(一般是一帧的开始)。接收机一旦检测到这个特定码组就确定了帧的起始位置,从而获得帧同步。此种方法可以迅速纠正帧失步,即一旦帧失步,只要在下一帧同步码就能恢复帧同步。 本接收机收到的数据帧格式为: 每192个信息字节加上2字节的帧同步码组成一帧数据(如图)。选用的帧同步码为0x19D7。 接收端采用帧同步码的滑动法来恢复帧同步信号。其实现方法为:在单片机里设置16bit移位寄存器、前后方保护计数器来完成前方保护时间和后方保护时间的计数,和帧同步状态位SFLAG,标志系统的同步状态。 当数据流进入移位寄存器,与帧同步码(0x19d7)相比较,如果不同则移位寄存器高位移出低位移入下一比特再进行比较,同步系统从不断接收输入的数据流中捕获到0x19d7码组,相当于第N帧有同步码,置SFLAG=1,后方保护时间计数器开始,如果经过192byte信息码在第N+1帧处检出同步码,后方保护时间计数器加1,应在第N+2帧再一次检出同步码,后方保护时间计数器加1,系统进入帧同步状态,进行数据定时接收。如果在第N+1帧处不能检出同步码或在第N+1帧处检出同步码而在第N+2帧处不能检出同步码,同步系统都要重新进入捕获状态。 在本接收机MSP430的程序中将前方保护时间计数器和后方保护时间计数器简化为一个时间计数器,即SCOUNT。SCOUNT的初始值为0,每接收到一个正确的帧同步码,SCOUNT加1,当连续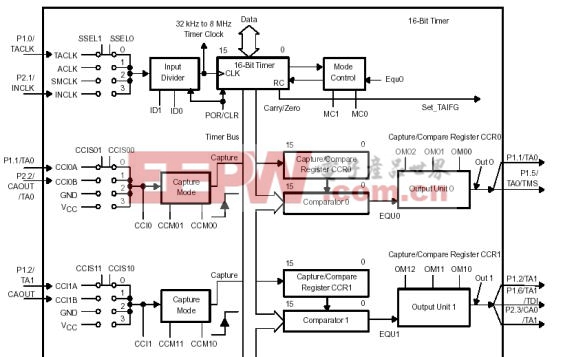



- μC/OS-Ⅱ在MSP430F149上的移植(03-01)
- MSP430与I2C总线接口技术的研究(06-14)
- 基于MSP430单片机的超声波倒车雷达监测报警系统设计(08-14)
- 2010年中国(成都)电子展胜利闭幕(08-15)
- 基于MSP430单片机的电子汽车限速器的研究(08-20)
- 基于MSP430的微功耗数据采集系统的开发应用(10-16)