基于单片机的新型海警舰艇电子舵角指示仪

4.2 测试方法
严格按照船艇舵角度指示器对舵方法测试,先将舵角指示器的指针指向“0”刻度,观察舵机室的实际舵角是否在正舵位置。然后再慢慢将舵轮往左(右)转到满舵,检查舵轮座上的舵角指示器与船尾杆上的指示刻度是否一致。接着用同样的方法向右(左)满舵进行一次,再快速转舵一次,然后操舵人员听令,分别连续地作左(右)5°,15°,25°,满舵操舵和回舵。最后进行从左满舵到右满舵、回舵的试验,以判断追随机构、工作系统和舵角指示器的可靠性、准确性、运转速度及平稳性。
4.3 测试数据和分析
C8051F020/1/2/3单片机所有模式和数字外设均可由用户固件使能/禁止和配置。FLASH存储器还具有在系统重新编程能力,可用于非易失性数据存储,并允许现场更新8051固件。片内JTAG调试电路允许使用安装在最终应用系统上的产品MCU进行非侵入式(不占用片内资源)、全速、在系统调试。该调试系统支持观察和修改存储器和寄存器,支持断点、观察点、单步及运行和停机命令。在使用JTAG调试时,所有的模式和数字外设都可全功能运行。
经过反复的测试,用万用表测得3组角度传感器的输出电压对应的角度值,3组数据取平均值,最后得出1组数据,并根据数学上的线性回归曲线原理,运用软件计算出本系统的线性回归曲线。如图5所示。
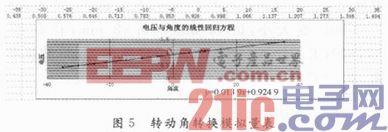
使用线性计算方法,得到线性回归方程:
y=0.013 9x+0.924 9
综合实验数据表明,该电子舵角系统达到了以下技术指标:
(1)电源电压:AC 220 V/50 Hz或DC 5 V;
(2)指示精度:0.1°;
(3)噪声等级:小于55 dB;
(4)接口形式:插座式;
(5)测量范围;±60°;
(6)精确度:0.002 85;
(7)抗摇摆和倾斜范围:横摇:±22.5°;纵摇:±10°;横倾:±22.5°;纵倾:±10°;
(8)显示灵敏度:小于等于0.1 s;
(9)偏舵极限角:大于等于±35°时发出声光报警。
单片机芯片有很多预留的功能,以便在其他领域拓展方面留有发展的余地。
完全集成的混合信号系统级MCU芯片,具有64个数字I/O引脚(C8051F020/2)高速,流水线结构的8051兼容的CIP-51内核(可达25 MIPS)高速,还包括A/D和D/A转换,可以进一步设计向船艇自动导航系统发展。且其具有高灵活性和扩展性,在军用伺服系统、天线系统、雷达测量系统、火炮控制系统和机床控制系统等都可以应用。有待于今后进一步挖掘更多的功能,拓展到其他领域的应用。
5 结语
通过对现有海警舰艇舵角指示系统的分析,运用电子技术和单片机技术,提出了一种新型的电子舵角指示方式,运用该方法设计了一种实用的电子舵角指示仪,最后,制作了实验样机并进行了实验。实验结果表明,本电子舵角指示方法可行,设计的电子舵角指示仪克服了现有舵角指示仪的不足,在公安海警舰艇建造和现有舰艇的改造中具有极大的推广应用价值。
在实验中还发现,本系统在传感器的防护方面还需进一步研究和设计,整机的封闭还需做进一步的改进,同时系统稳定性及其他性能还需在使用过程中做进一步的考证。
舵角指示仪 海警舰艇 角度传感器 C8051F020单片机 相关文章:
- 基于MSP430单片机的电子汽车限速器的研究(08-20)
- 一种基于磁电式的角度传感器设计(05-15)
- 解析角度传感器工作原理及应用(04-14)
- 基于单片机AT89S52的电动车跷跷板设计(03-05)
- 基于LM3S615单片机的自动测高测距小车的研究与设计(11-09)
- 汽车侧向倾斜角度传感器的应用初探(07-04)