基于控制专用单片机的无刷直流电机控制器
60°,这时电机由定位位置转到下一个位置的过程中,3次谐波信号已经有效,并向微机发出1次换相中断,使得电枢磁场再向前跳进60°,转子在电磁转矩的作用下向前旋转,到达换相位置时,由3次谐波检测出的转子位置信号向微机发出1次换相中断,使电枢又向前跳进,如此循环,可能使电机逐渐运行至稳定状态。实验证明,这种简化的起动方法完全可行。?
3 控制系统原理图[4]
由于80C196KB强大的功能,使得以往必须采用外围扩展硬件电路完成的功能,比如相位差检 测电路、A/D转换电路、转向控制电路、PWM波生成电路等,现在都可以利用80C196KB本身所 带的硬件设备或控制软件来完成,使CPU外围电路大大简化,减少元器件相互之间的电磁干 扰,可靠性也大大提高。根据以上所分析的各功能实现电路以及实现办法,可以构出如图2 所示的控制系统原理图。
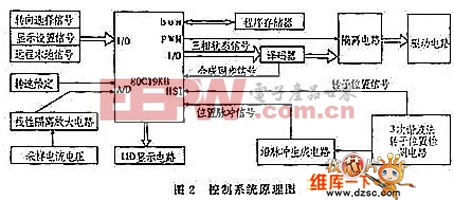
在本系统中,80C196KB的P3、P4口用于作系统总线,P2口用于作为特殊功能口,P1口作为IO 口,P0口用于作A/D转换以及输入口。
4 控制软件的实现
主程序主要任务是初始化各变量及标志的值,设置CPU各设备的控制字,初始化各端 口状态及开启相应的中断,并调节电机的转速。其流程如图3所示。
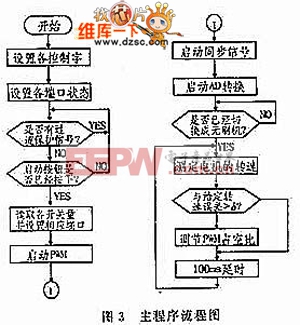
HSI FIFO保持寄存器有效中断主要任务有两个,一个是在同步机运行状态时,检测 同步信号 与位置信号的相位差,当相位差满足规定的条件后,负责切换成无刷机运行状态。另一个任 务是在切换成无刷机运行状态后,还承担测周法检测电机转速的任务。
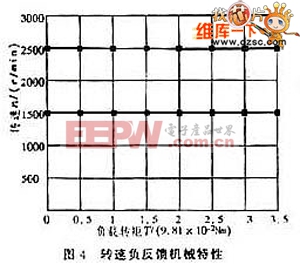
5 实验结果
本文对250W的样机进行了转速负反馈控制实验,图4是电机转速给定量分别为1 500r/min和 2500 r/min时,负载从空载至额定负载变化时的稳态转速。实验结果表明,系统可以 可靠地工 作。电机转速的稳态误差小于32r/min,产生这一误差的主要原因是由于PWM发生器占空比分 辨率只有8位。本文设计的控制系统,如果用于压缩机电机等场合,其性能已满足要求
参考文献:
[1].GAL16V8datasheethttp://www.dzsc.com/datasheet/GAL16V8_345888.html.
[2].80C196KBdatasheethttp://www.dzsc.com/datasheet/80C196KB_74.html.
- FPGA的DSP性能揭秘(06-16)
- 基于单片机通用引脚的软件UART设计(10-16)
- 分时操作系统思想在单片机中的具体应用 (10-30)
- 基于AT89C51+DSP的双CPU伺服运动控制器的研究(05-26)
- 关于RTX51 TINY的分析与探讨(05-30)
- 基于MC9S12DGl28单片机的智能寻迹车设计(04-03)