基于瑞萨单片机自动寻迹智能车的设计
时间:04-24
来源:互联网
点击:
3. 2 速度控制算法
智能车控制算法采用PID算法,包括3个部分:测量、比较和执行,即把测量得到的量与期望值相比较,然后用合格误差纠正调节控制系统的响应。PID控制算法是建立在经典控制理论上的一种控制策略。PID控制算法能够在保证不影响系统稳定精度的前提下提高系统的稳定性,并改善系统的动态性能。根据实验情况和现场调试经验,小车在直线运动时不进行PID控制,以最大速度运动,处于一般弯道状态时则引入PID算法,这样可以根据实际情况调节速度,使小车具有良好的可控性。PID控制器原理框图如图3所示。
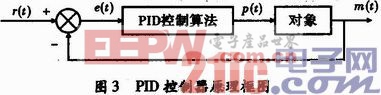
系统主要由PID控制器和被控对象组成。它根据给定值r(t)与实际输出值m(t)构成控制偏差,将偏差按比例、积分和微分通过线性组合构成控制量,对被控对象进行控制。
PID的图形表达式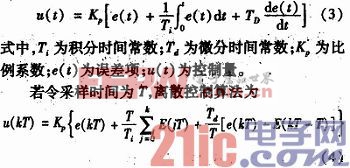
式(4)中,T是采样周期,必须足够小,以保证系统有一定的精度;Ti为调节器的积分时间;Td为调节器微分时间;Kp为调节器的比例系数;e(k)为第k次采样时的偏差;u(k)为控制量。
采用增量式PID进行控制,由△u(kT)=u(kT)-u(kT-T),可得
△u(kT)=Kp[e(kT)-e(kT-T)]+Kie(kT)+Kd[e(kT)-2e(kT-T)+e(kT-2T)] (5)
式中,e(kT)为第k次与中心位置的偏差程度;e(kT-T)、e(KT-2T)分别为k-1、k-2次误差项。以此算法为基础,用C语言编写出控制算法程序。
3.3 程序设计
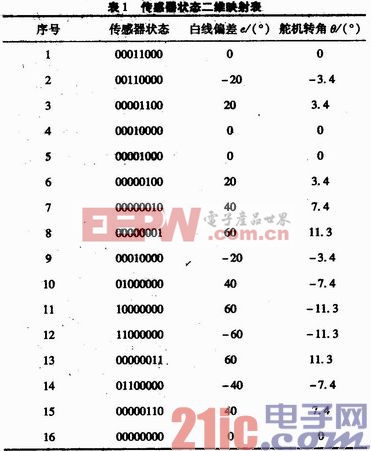
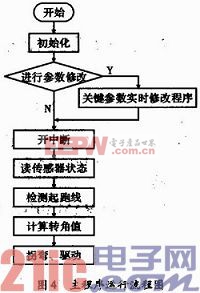
主程序采用周期性检测控制思想。每隔20ms检测1次引导线、车速及加速度数据,根据程序处理结果调用舵机控制程序和驱动电机控制程序,对智能车的运行状态进行实时控制,以完成循线运行的要求。主流程图如图4所示。
智能车设计涵盖了自动控制、电子等多个学科,其技术可被应用到智能机器人、自动化作业平台等领域,具有较强的实用性。论文结合实际设计经验,从智能车的硬件设计、软件设计等方面讨论了智能车的设计。试验证明,用PID算法即使在路面导引线复杂的情况下,也能较好地保证智能车沿正确的方向前进,以及运行的平稳性。
- 基于FPGA的DSP设计方法(08-26)
- 电力电子装置控制系统的DSP设计方案(04-08)
- 基于DSP Builder的VGA接口设计(04-10)
- 基于DSP和USB的高速数据采集与处理系统设计(05-01)
- 数字信号处理(DSP)应用系统中的低功耗设计(05-02)
- 基于DSP的嵌入式显微图像处理系统的设计(06-28)