基于ARM的智能车载终端设备系统的设计
首先,模块上电复位后,请求标准/所有的卡。如果在天线有效范围内有一张以上的卡存在,调用反冲突函数uchar miffsanticoll(uchar Bcnt,uchar idata*_SNR),并取得所选择的卡的唯一序列号。选中卡之后,根据所要访问的卡内存储器位置,使用相应的密钥进行3轮确认。在成功确认后,可以对卡内存储器进行读、写、增值、减值等一系列操作。以上这些步骤可以直接调用周立功公司提供的读写卡模块C51函数库实现。 3.2.3 GPRS数据传输
在主程序中,设置定时器0作为SPI串行接口的看门狗定时器,该定时器被设置成50 ms溢出。数据发送时开定时器中断,若中断之前通信未能完成(ZLG500A在SDATA线上未返回响应信号),而造成该定时器产生中断,则取消本次传输,发送子程序返回SPI_ERR;数据接收时关中断,用软件判断溢出次数,若在500 ms内未收到ZLG500A返回的数据,则退出本次命令的执行,命令返回SPI_ERR。
3.2.2 GPS数据解析及处理
车载终端工作时,GPS模块会源源不断地把接收到的GPS导航定位信息通过串行口输出给ARM微处理器,这些数据信息主要由帧头、帧尾和帧内数据组成。系统所需的GPS数据,如经纬度、时间日期、速度等信息,均包含在“$GPRMC”帧内。“$GPRMC”的帧格式如下:
$GPRMC,024813.640,A,31 58.4608,N,11848.3737,E,10.05,324.27,150706,,,A*50
数据接收时,首先通过依次检测“$GPRMC”的ASCII码是否正确。若检测无误,则确认该帧为有效帧,再接收帧内数据并进行解析。然后按照表1的协议封装成UDP数据包,通过GPRS传输到主控中心,主控中心通过软件将车辆的位置实时显示在电子地图上。GPS数据传输协议如表1所列。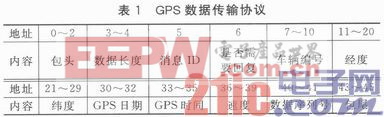
由于本系统所用的GPRS模块SIM300C内部嵌入了TCP/IP协议栈,因此只要发送相关AT指令,嵌入式TCP/IP协议就可完成SIM300C接入Internet的工作,实现无线数据传输的功能。
利用AT指令控制SIM300C模块建立无线信道,并进行数据传输的步骤如下:
①AT+CIPCSGP=1,“CMNET” 设置GPRS连接方式。
②AT+CLPORT=“TCP”,“3030” 设置TCP端口号。
③AT+CIPSTART=“TCP”,“主站IP地址”,“端口号” 建立TCP连接,主站的IP地址必须为公网的IP地址,连接成功后返回“CONNECT OK”。
④AT+CIPSEND等待模块返回“>”后,将要发送的数据送入GPRS模块中,然后再发送回车,数据即可发送出去。
若建立连接后长时间没有数据传输,移动网关将会自动关闭连接,重新分配IP地址。所以,为了保证网络的正常连接,采用每2 min发送一个心跳包的方式。
结语
本文提出了一种基于ARM微处理器和μC/OS-II操作系统的智能车载终端设计方案,利用GPS、GPRS和IC卡读写等技术,实现公交刷卡消费和实时定位监控等功能的一体化,将城市中所有的公交车连成一个网络系统,形成一个城市交通物联网的雏形。实验证明,该智能车载终
端具有模块化、功耗低、性能稳定、可扩展等特点。
ARM LPC2103 &mu C/OS-II GPS GPRS 相关文章:
- Linux嵌入式系统开发平台选型探讨(11-09)
- 基于ARM体系的嵌入式系统BSP的程序设计方案(04-11)
- 在Ubuntu上建立Arm Linux 开发环境(04-23)
- 达芬奇数字媒体片上系统的架构和Linux启动过程(06-02)
- SQLite嵌入式数据库系统的研究与实现(02-20)
- 革新2410D开发板试用手记(04-21)