基于飞思卡尔单片机的两轮车控制系统设计
1.前言
本文以飞思卡尔的小车模型为对象,设计了以飞思卡尔单片机MC9S12XS128为核心,自主循迹的两轮车自平衡控制系统。
实验证明该方案在摄像头导航的两轮车系统中具有准确、快速、稳定的自主寻迹效果。
2.系统设计与原理
本系统以飞思卡尔公司生产的MC9S12XS128单片机为控制核心,主要由电源管理模块、路径检测模块、车速检测块、加速度检测模块、角速度检测模块、直流电机驱动模块、液晶显示模块、串口调试等功能模块构成。在电源管理模块为系统提供稳定电源的基础上,单片机把加速度和角速度检测模块获得的小车姿态信息、路径信息检测模块获得的小车前进方向信息、车速检测模块返回的车速信息通过PID算法控制直流电机驱动模块,以使得小车在保持直立的前提下快速地行驶。
液晶显示模块可以实时地显示系统相关参数,串口调试模块把接收到单片机的数据送往上位机,方便相关参数及波形的实时观察和调试。系统框图如图1所示。

3.系统硬件设计
3.1 主控制器模块
本系统的主控制器是飞思卡尔公司生产的16位MC9S12XS128单片机,它负责对智能车所采集到的信号进行处理并向各个功能模块发送控制信号。MC9S12XS128单片机最高总线频率可达40MHz,片内资源包括8KRAM、8K EEPROM和128K Flash,拥有4路8位或2路16位脉宽调制模块(PWM)、2个8路10位A/D转换器和带有16位计数器的8通道定时器、UART、PIT、I2C、FTM等外部接口模块。
3.2 电源管理模块
可靠的电源是系统稳定运行的前提。
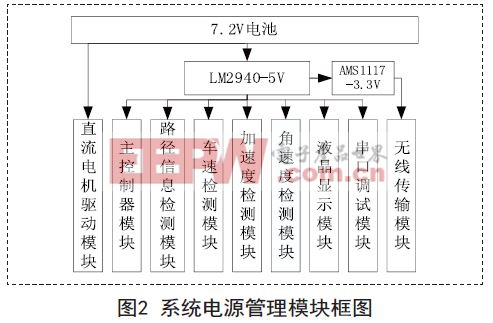
本系统采用额定电压7 . 2 V 、额定容量2000mAh的镍镉电池作为动力 源。为减小电源纹波,获得更稳定的供电电压,本系统选用串联线性稳压芯片LM2940搭建5V稳压电路,并分别向主控制器模块、路径信息检测模块、车速检测模块、加速度检测模块、角速度检测模块、液晶显示模块和串模口调试模块供电,再经过AMS1117稳压到3.3V,向无线传输模块供电。直流电机驱动模块则直接由电池供电。系统电源管理模块框图如图2示。
3.3 路径信息检测模块
由C O M S摄像头和硬件二值化电路组成的路径信息检测模块通过检测跑道两边2.5cm宽的黑线来拟合赛道中心以实现路径信息检测。COMS摄像头是按固定分辨率以隔行扫描的方式采集图像上的点,并将这些点的灰度值通过图像传感芯片转换成模拟电压信号,然后采用二值化电路把此信号转换成数字信号,通过单片机I/O口采集获得赛道信息。硬件二值化检测电路如图3所示。 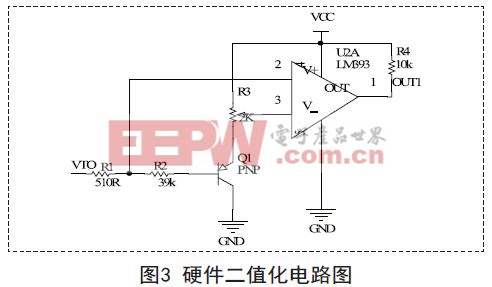
硬件二值化电路的工作原理是通过图像传感芯片获得的模拟信号经R1、R2限流后输出到三极管Q1,使三极管Q1始终处于不饱和放大状态。R3上的电流大小随此模拟信号的变化而成反比变化,从R3采样出来的电压信号即为通过图像传感芯片获得模拟信号的镜像信号,最后通过比较器输出表征赛道信息的数字信号。
3.4 车速及运动方向检测模块
为了实现系统的闭环控制,在车模运行过程中需要实时监控其速度。本系统在左右电机上各安装一个500线两相光电编码器。在固定周期内,利用单片机内部计数器测量由编码器返回的脉冲信号个数以获得车模的运动速度大小;由于编码器A、B两相相位差为90°,可通过比较A、B两相信号先后顺序来判断电机的正反转,便可知道小车的运动方向。
3.5 加速度检测模块
加速度计可以测量由地球引力作用或者物体运动所产生的加速度。本系统选用MMA7260作为加速度检测器件,MMA7260是一款低成本单芯片三轴高灵敏度加速度传感器,可以同时输出三个方向上的加速度模拟信号,具有功耗低、工作范围宽等特点,并且具有4种不同的高灵敏度选择模式以适应不同的加速度的测量要求。
通过软件设置让加速度传感器采用800mV/g的工作模式,使MMA7260各轴信号输出灵敏度为800mv/g,这时信号不需要进行放大,可以直接送到单片机进行A/D转换。同时由于MMA7260采用了开关电容滤波器,会有时钟噪声产生,所以需要在传感器输出端采用RC滤波电路,以改善信号的质量。加速度传感器在受外界振动时易带来测量误差,并且测量误差的大小和传感器在车模上安装的高度成正比。为减小由于安装高度带来的测量误差,加速度传感器在小车上应尽可能安装得低一些,但是依然不能彻底消除由于小车振动带来的误差,因此需要角速度传感器的辅助来获得车模直立平衡控制所需要的倾角信息。
3.6 角速度检测模块
本系统选用陀螺仪ENC-03来测量物体在旋转时的角速度。陀螺仪的输出信号是相对灵敏轴的角速度,通过角速率对时间积分可得到围绕灵敏轴旋转过的角度值,即小车的倾斜角度。因为陀螺仪易受温度和震动等因素的影响而产生微小的漂移和偏差,经积分后形成累计误差,
- 飞思卡尔单片机MC9S12XEP100中断优先级设置(11-28)
- 飞思卡尔单片机PLL时钟总线模块(11-22)
- DSP和PBL3717A构成的步进电机的控制系统(04-01)
- 基于DSP的新型弹载控制计算机(04-05)
- 基于TMS320VC5509A的语音识别与控制系统(06-17)
- 基于DSP的智能刹车控制系统研究(07-29)