基于 AVR 单片机的自动对靶喷雾控制系统设计
时间:10-09
来源:互联网
点击:
5. 实验结果
本实验在直径 67cm 的转盘上进行,通过转盘转动模拟拖拉机的行走。本实验测定了不
同转速下的实际对靶延迟时间,其中每个转速下用秒表测定 20 次,实验数据如表 1 所示
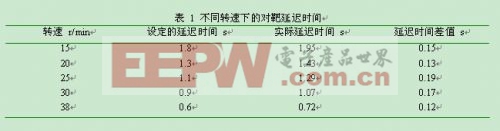
设定的延迟时间即软件中的延迟时间 T,实际延迟时间为摄像头从采集到靶标图像到执行机
构进行喷雾之间所经过的实际时间。其能实现自动对靶的最大转速为 38r/min 即 1.33m/s。
而且通过表 1 数据可知,延迟时间误差小于 0.2s,可满足自动对靶的要求。
6. 结论
本系统通过对电磁阀的控制实现了农药喷施的自动对靶,并在实验室条件下调试成功。
该系统运行稳定,延时准确,在一定速度范围内能实现精确对靶,从而大大提高了农药的利
用率,并且硬件实现简单,为进一步在田间推广打下了很好的基础。若能进一步优化图像处
理算法,减少图像处理时间,以及提高硬件的响应速度,从而提高能响应自动对靶的行走速
度,并且提高图像处理算法处理复杂背景下的杂草识别的能力,实现在田间复杂环境下的自
动对靶喷雾。
- Flash损耗均衡的嵌入式文件系统设计(06-01)
- 锁相环控制及初始化简析(08-27)
- 基于AVR单片机的ISP1362OTG设计(09-06)
- 基于AVR单片机的串口转FSK的通信模块设计(01-23)
- 案例分析:基于AVR32的隧道环境监测系统(03-18)
- 科技帮我们远离灾难:灾难检测飞行器(03-18)