基于人工气候室的温湿度控制
图5所示。
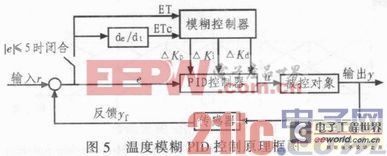
由前面可知,设ET、ETc、△Kp、△Ki和△Kd的模糊论域均为{-3,-2,-1,0,1,2,3},并划分成7档的语言变量模糊集合:ET=ETc= △Kp=△Ki=△Kd={NB,NM,NS,0,PS,PM,PB},对应为{负大,负中,负小,零,正小,正中,正大},隶属函数仍选择如图4所示三角形分布。根据控制原则及PID参数整定原则,可以总结出△KP、△KI和△KD的控制规则的语言描述如下:

3 系统运行状况
为了对设计好的温湿度控制器进行测试,在内蒙古大学生物学院人工气候室的现场,设定2个运行时段,时段1设置参数为:温度25℃、湿度60%、二氧化碳500p pm、光照3级;时段2设置参数为:温度15℃、湿度70%、二氧化碳500 ppm、光照3级。为了便宜测试,各时段运行时间均设置为30分钟,且循环运行。每分钟记录一次数据绘制出如图6所示的实时温湿度曲线。
系统运行前温度为30℃,湿度为50%。由图6可知:
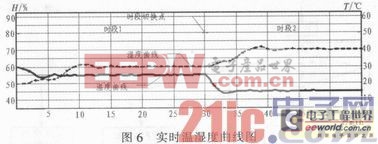
时段1:先对温度进行模糊PID控制,温度5分钟内基本到达控制精度范围(25℃±1)。然后对湿度进行模糊控制,图中显示,湿度快速(大约7分钟)到达控制精度范围内(60%±5)。
时段2:当系统运行到30分钟时,到达时段切换点进入时段2。当前温湿度为时段1的控制温湿度25℃和60%,而时段2的设定温湿度为15℃和70%,系统瞬时误差很大。系统任然先对温度进行模糊控制,使其快速到达控制点15℃左右,然后用模糊PID对其进行精确控制,使其控制在要求精度范围(15℃±1)内。当温度达到控制要求后,对湿度进行模糊控制,同样很快到达控制要求范围(70%±5)内。
4 结论
不难看出,温度的变化对湿度影响明显大于湿度的变化对温度的影响(由图可知湿度变化时温度基本没有波动),因此选择先温控后湿控的解耦方法是行之有效的。系统的响应速度较快(温度5分钟左右达到控制要求,湿度7分钟左右达到控制要求)、超调量小(温度小于2 ℃,湿度小于10%)、控制精度高(温度±1℃,湿度±5%),同时在时段切换点能做到快速平滑的控制要求。结合了模糊控制和PID控制的优点又避免了二者的不足,两者相结合,使人工气候室的温湿度控制效果达到最佳。
- 基于CAN-bus 总线的模拟空调温/湿度控制系统(07-11)
- 基于51单片机的库房温湿度控制系统(10-15)
- 模糊PID控制器在伺服系统中的应用(12-12)
- 定形机排气湿度监控系统设计(10-08)
- 基于自适应模糊PID智能车用直流电机控制器仿真研究(11-22)
- ARM9在高精度生化分析仪温度控制系统中的应用(12-23)